

麻省理工学院 CSAIL 的机器人海星可以更深入地研究水生生物
正如 Adam Conner-Simons 或 MIT CSAIL 所报告的那样,科学家们发明了一种“机器人海星”,让我们对水生生物有了更多的了解。 (参见下面的视频。)
生物学家长期以来一直面临着记录海洋生物的挑战,许多鱼类被证明对人类的水下运动非常敏感。
作为一种可能的解决方案,计算机科学家一直在开发可以在碳基机器人之间悄悄移动的特殊海洋机器人。例如,2018 年,麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的一个团队制造了一条软体机器鱼,它可以与真鱼一起沿着斐济的珊瑚礁自主游泳。
然而,水运动的复杂动力学——以及它快速破坏一些完美电子系统的能力——使得水下机器人与空中或陆地机器人相比尤其难以开发。
对于这条鱼,CSAIL 团队不得不经历数月的反复试验来手动调整设计,使其能够真正可靠地在水中工作。
虽然该机器人是一个特别复杂的机器人,但由麻省理工学院教授 Wojciech Matusik 和 Daniela Rus 领导的一个小组仍然认为还有加快生产过程的空间。考虑到这一点,他们现在创建了一个新工具,可以在几个小时内模拟和制造功能性软机器人。
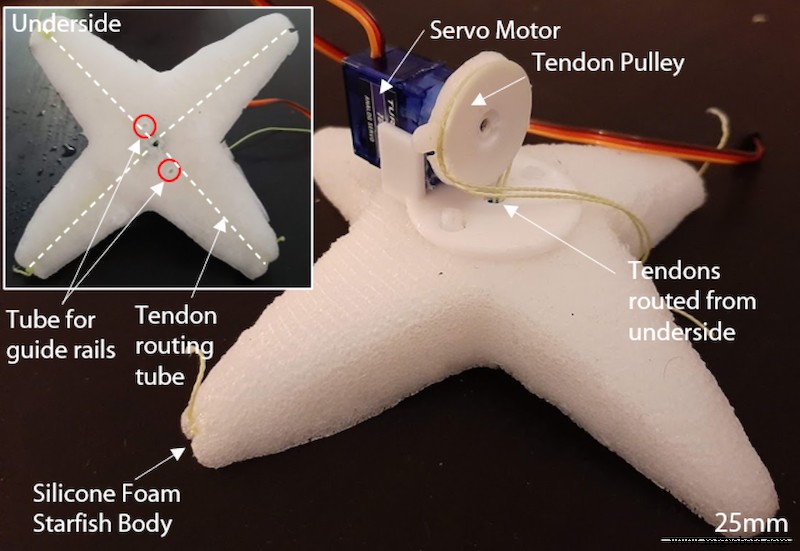
该团队使用他们的系统制造了一种由硅泡沫制成的软机器人海星,并且能够通过单个低功率执行器移动。海星通过四条腿上的肌腱移动,这些肌腱连接到伺服电机,用于弯曲和放松腿。
CSAIL 博士后 Josephine Hughes 与博士生杜涛共同撰写了一篇关于海星的新论文,她说:“水下机器人与其周围的流体力之间的被动相互作用——无论是平静的水流还是起伏的波浪——都是比机器人在稳定的地形上行走要复杂得多,这使得创建其控制系统非常困难。
“但是使用这个模拟器,一个通常需要几天或几周的过程可以在几个小时内完成。”
杜说,团队之所以选择海星设计,是因为它的动作简洁优雅,腿部的挤压和释放创造了向前的运动。
然而,该团队发现该模拟器适用于多种体型,因此他们接下来将探索受海龟、蝠鲼和鲨鱼启发的设计,这些设计涉及更复杂的结构,例如关节、鳍和脚蹼。
该小组的工具包括一个机器学习模型,对机器人的控制机制进行初步模拟和设计,然后快速制造。
然后使用机器人的实际实验来获取更多数据,以反复改进和优化其设计。结果是机器人通常只需要再制造一次。 (关于模拟工具开发的另一篇论文目前正在审查中。)
“在进行机器人模拟时,我们必须做出近似,根据定义,在模拟和现实之间造成差距,”新加坡国立大学控制和机电一体化教授 Cecilia Laschi 说,他没有参与这项研究。
“这项工作旨在通过非常有效的模拟和真实实验的混合循环来缩小现实差距。”
对于海星的身体,该团队使用了硅胶泡沫,因为它具有弹性、自然浮力和快速轻松制造的能力。在实验中,研究人员发现海星在水中的移动速度是使用手工控制器时的四倍。由人类专家。
事实上,休斯说,团队发现模拟器似乎采用了人类自己不会想到的控制策略。
“通过机器人海星,我们了解到,除了它们所做的那些非常明显的腿部推进之外,还有一些更微妙的高频运动可以赋予它们重要的动力,”休斯说。
该项目建立在一系列专注于软体机器人的 CSAIL 项目的基础上,Rus 说软体机器人有可能比刚性机器人更安全、更坚固、更灵活。
研究人员越来越多地将软机器人用于需要在狭窄空间中移动的环境,因为此类机器人在从碰撞中恢复的能力更强。
Laschi 说,该团队的工具可用于开发用于测量深海不同位置数据的机器人,以及普遍设想可以以研究人员尚未想到的新方式移动的机器人。
“像海星机器人和 SoFi 这样的仿生机器人可以在不干扰海洋生物的情况下更接近海洋生物,”Rus 说。 “未来,通过快速设计和制造仿生机器人仪器,将有可能创建可部署在荒野中观察生命的定制天文台。”
Du 和 Hughes 与 Matusik、Rus 和麻省理工学院本科生 Sebastien Wah 共同撰写了这篇论文。该论文于本周发表在《机器人自动化快报》杂志上,还将在下个月的 IEEE 软机器人国际会议 (RoboSoft) 上发表。
自动化控制系统