

螺栓控制机器人车
组件和用品
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
应用和在线服务
 |
| |||
 |
|
关于这个项目
免责声明:
该项目在制作过程中没有损坏任何电子设备。
第一幕:美好的一天...
我们从早上开始工作,手上还有很多文档和代码测试,我们迫切需要休息一下,但是,玩桌上足球并不理想,因为它会把我们踢出禁区。因此,为了保持镇定,我们开始考虑我们可以做些什么来放松我们,但仍然会让我们留在那个“工作区”。那时我们的经理建议“你为什么不做一个小项目并将其放在 Hackster 上?”。好,叫 Pranav。
所以我们决定制作一个互联网控制的 -wait-for-it- RC 机器人,有一个小小的奖励功能(我们稍后会透露,因为悬念很重要)。

好吧,所以我们打起了精神,我们冲到内部五金店。
第二幕:硬件森林
我们到了五金店,里面装满了工具包和组件,让你的眼睛闪烁着贪婪,你的手会被拉向它们,在你意识到之前,你将焊接零件来制作一个 8 位计算器,但是,我们很专注并没有让这些分心强迫我们,我们只是抓住了我们需要的东西(你也应该如此)
1. Bolt Wifi 模块

2. 基本机器人套件

3. Arduino UNO 或 Boltduino


4. L298N 电机驱动屏蔽

5.接近传感器

6. 跳线

7. 电源适配器

第三幕:锻造
我们带着我们需要的所有零件安全地从硬件森林回来。是时候让 Hardwarey 的大领主 Devashish 施展他的魔法并组装这个小机器人了。

他是这样做的。
组装硬件
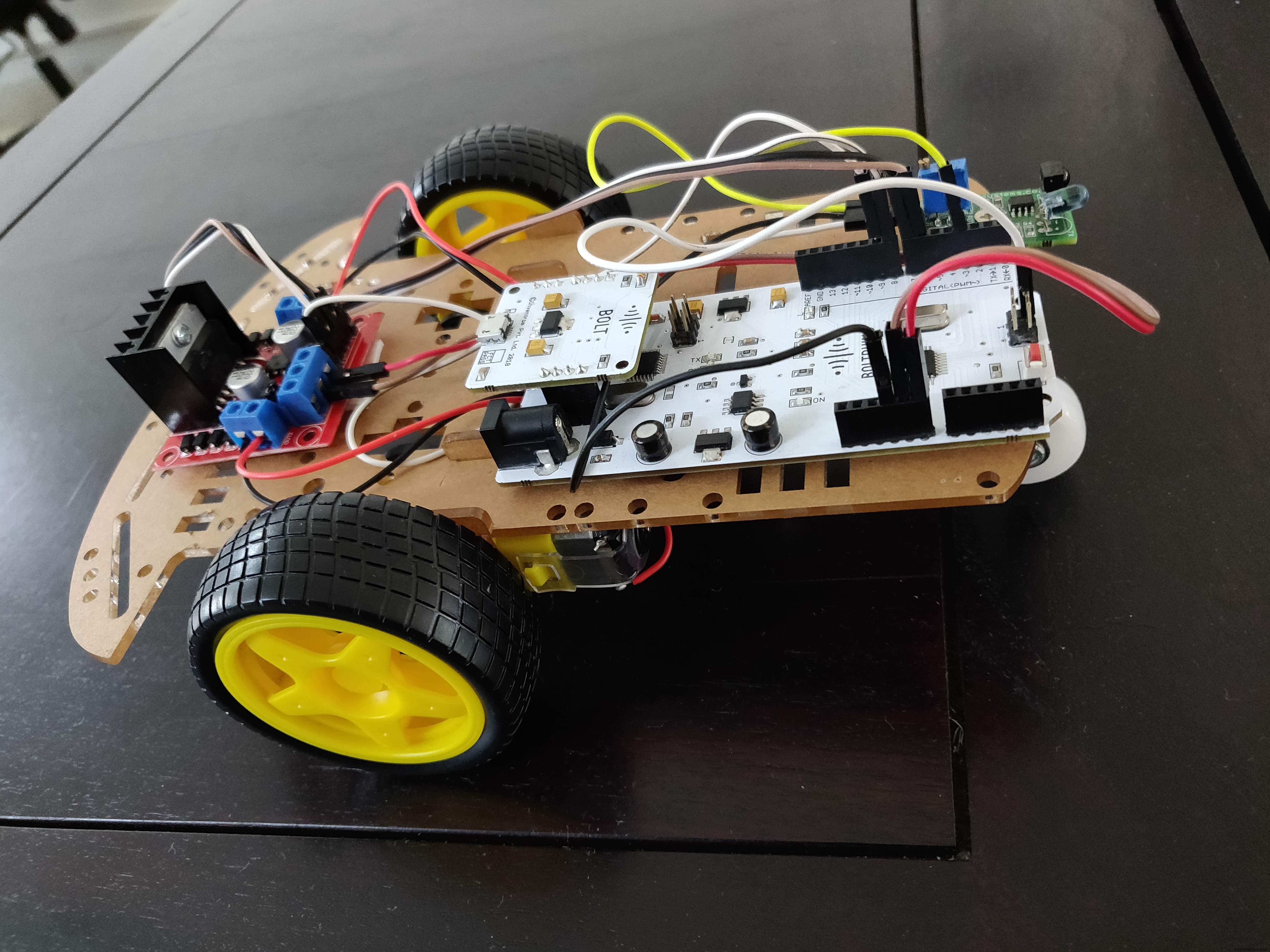
1. 如图所示,将脚轮安装在底盘的前中部。
2. 组装机器人汽车底盘并使用螺母和螺栓以及如图所示的车轮连接两个直流电机。
注意:将电线焊接到电机端子上,然后再将其连接到底盘上。
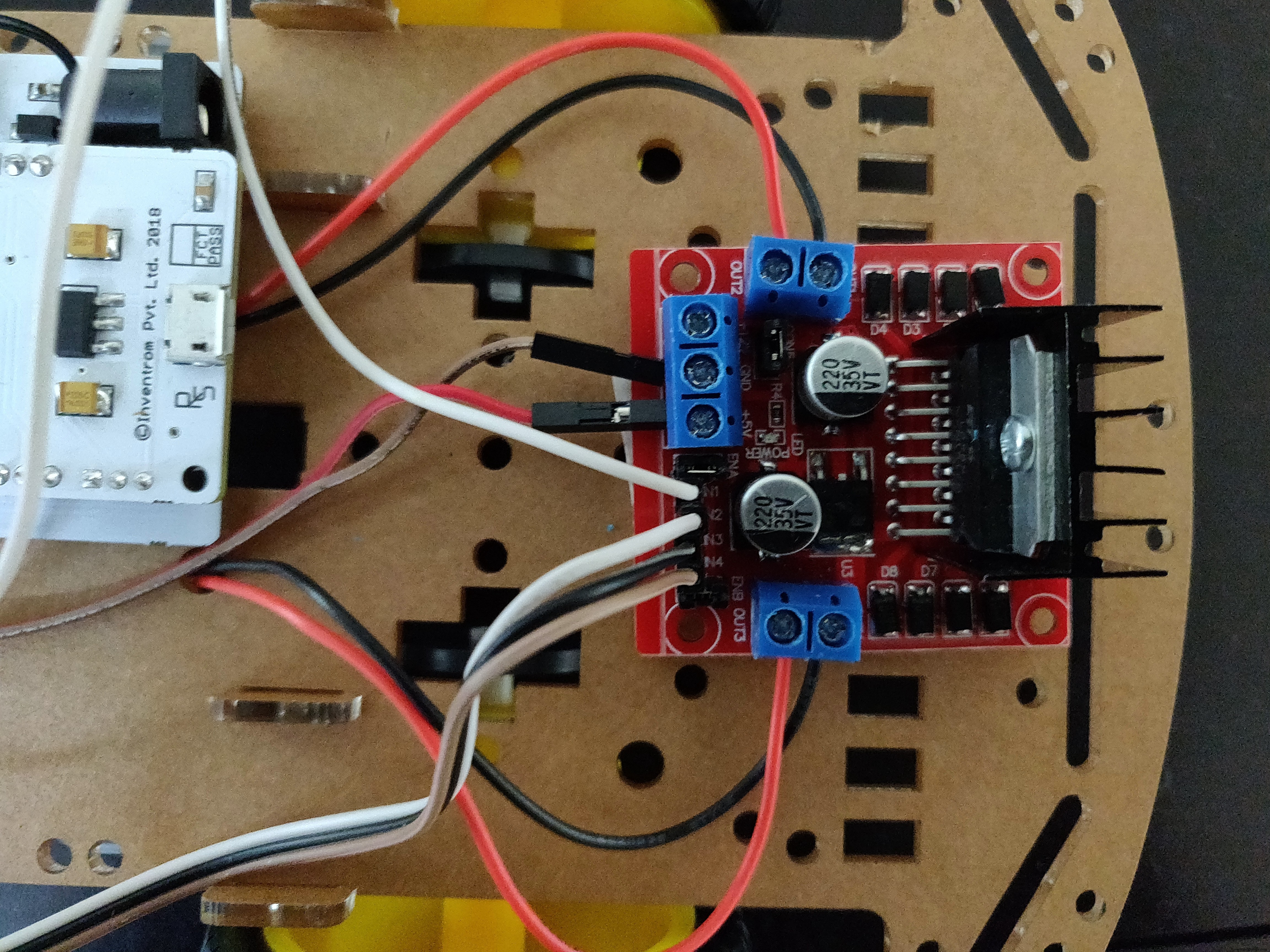
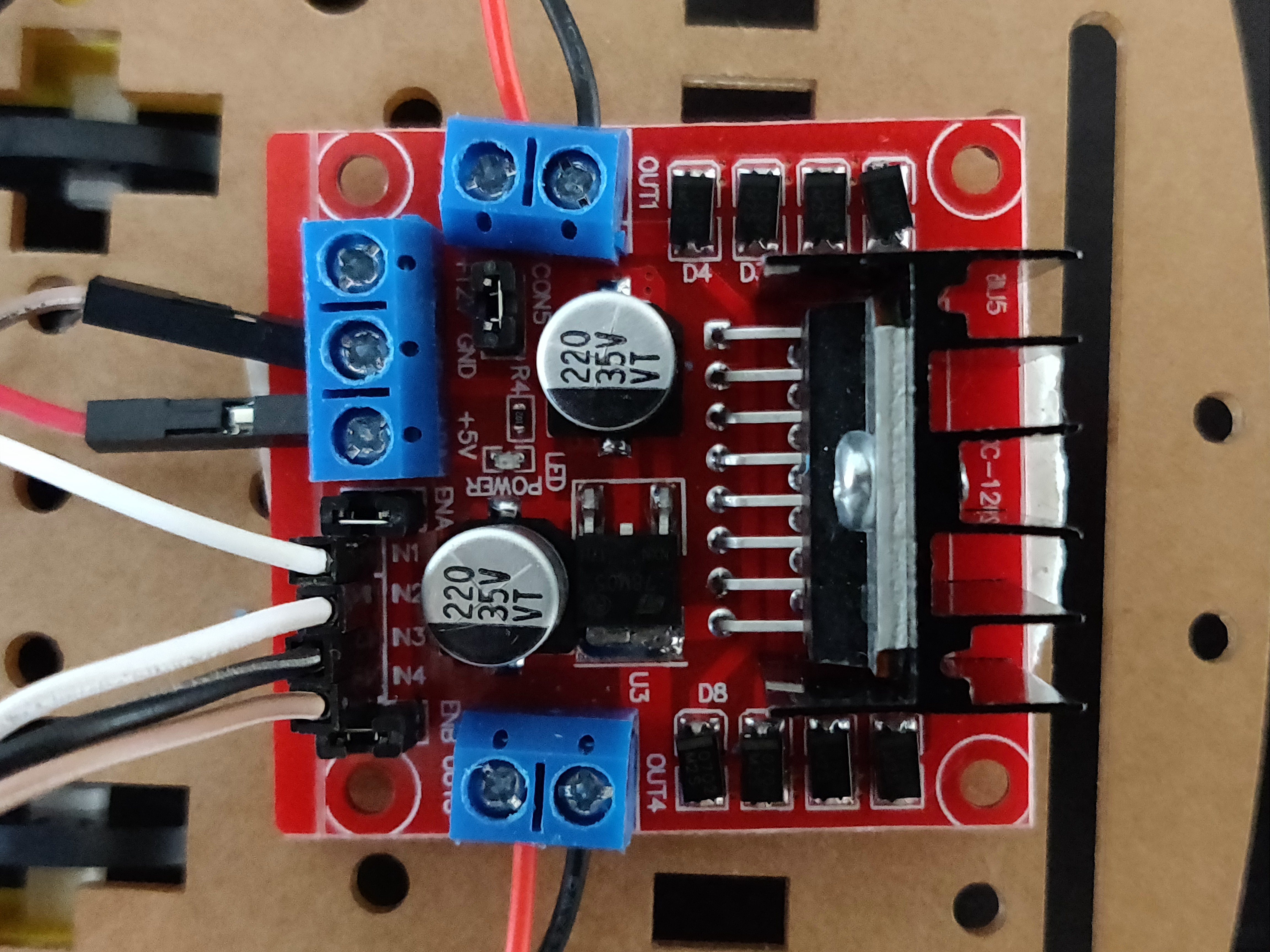
3. 现在将电机的端子连接到 L298N 电机驱动模块,如下图所示。
注意:将电机的两个端子连接在驱动模块的同一侧。
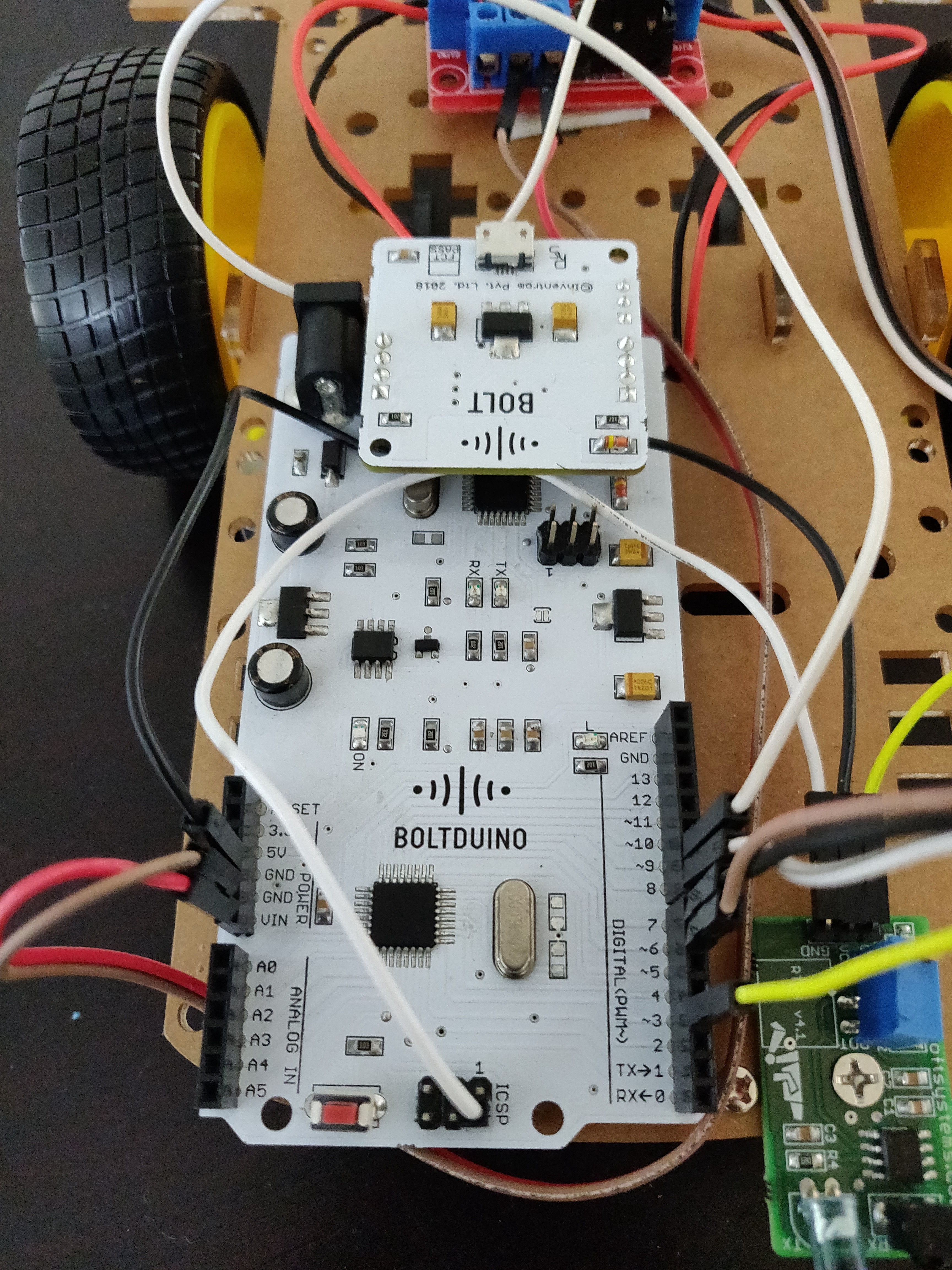
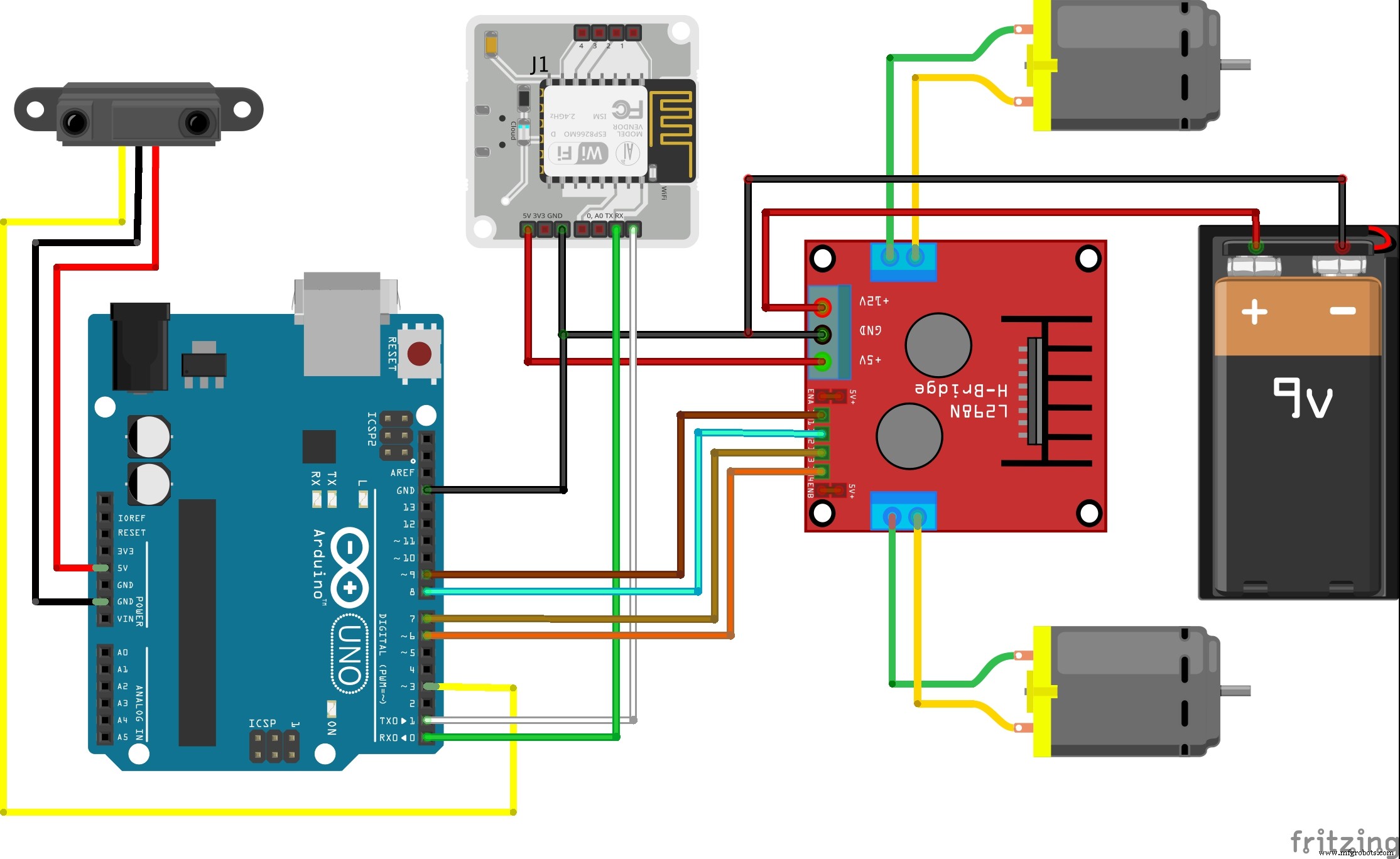
4、将驱动模块的5V脚和GND脚分别连接到Arduino的5V和GND。
5. 将 Bolt 的 5V、GND、Tx 和 Rx 引脚分别连接到 Arduino 的 5V、GND、Rx 和 Tx 引脚。对于 Boltduino,将 Bolt 单元连接到现有插槽中。
6. 将四个输入端子(IN1、IN2、IN3、IN4)分别连接到引脚 6、7、8 和 9。
7. 将接近传感器的 5V、GND 和 OUT 引脚分别连接到 Arduino 的 5V、GND 和 3 引脚。


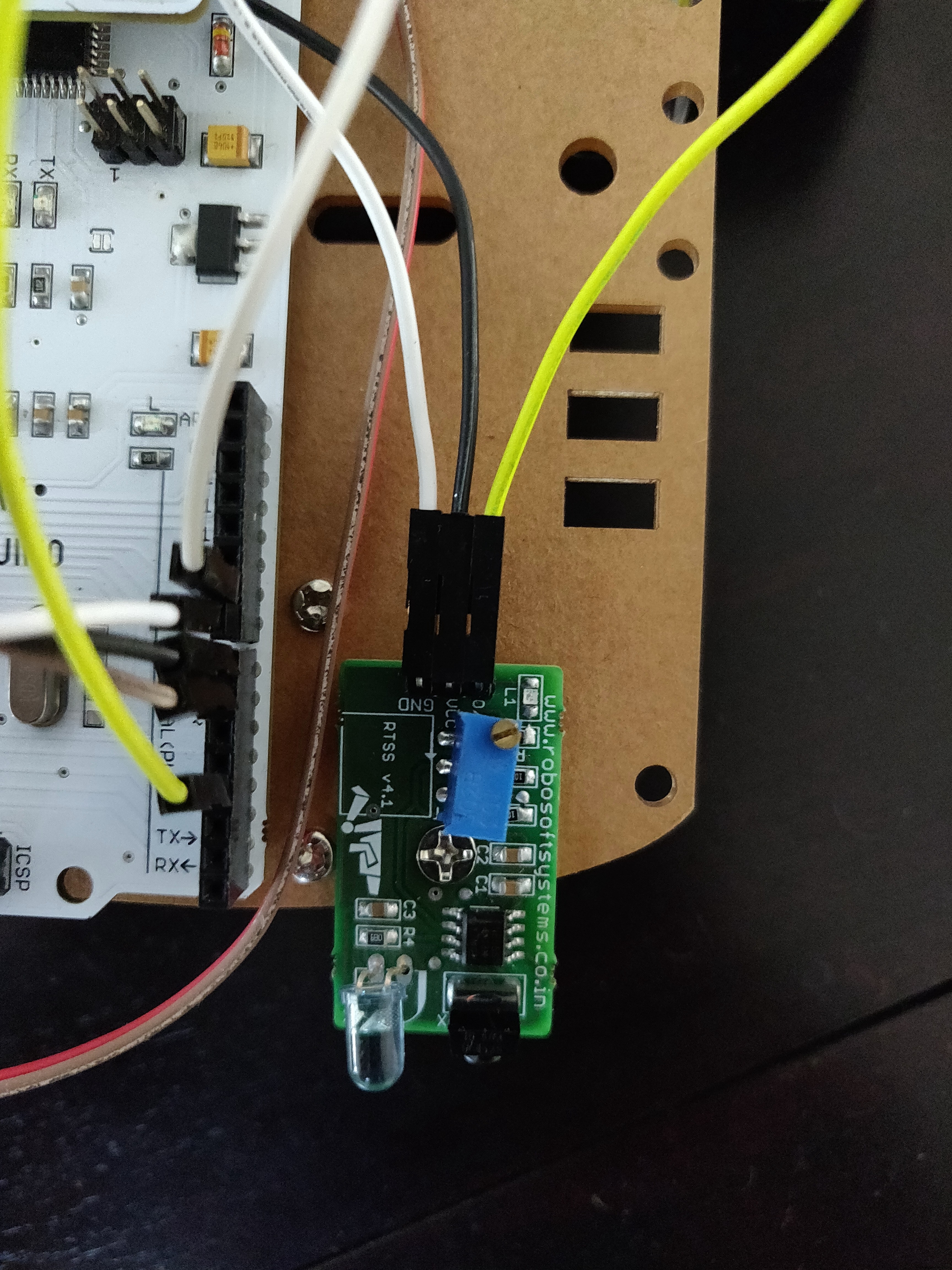
注意:对于任何 进一步帮助查看下面给出的原理图。
将 Bolt 连接到云端
组装硬件后,注册 Bolt 单元并将其连接到 Bolt Cloud。了解更多注册和连接螺栓到云。
第四幕:然后有连接
现在,Hardware 大领主派来了 Code of Kiln 的刺客(即我)。
他的任务是用他的代码使这个机器人栩栩如生,并将其连接到云端。跟随他的脚步,让您的机器人也能正常工作。
步骤 1: 获取 代码。
从该项目的 Github 存储库中获取代码。下载一个 .zip 文件或将其克隆到您的系统,任何适合您的方式。
步骤 2: 工作 与 代码。
有两部分代码:
- 名为app的文件夹
- 在这个文件夹中有两个文件 i. controller.html ii. controller.js。 我们稍后会讨论它们。
- 然后是一个名为 Bolt_Robot_Car.ino 的文件中的 Arduino 固件 .这将在您的 Arduino 上闪烁/上传。
步骤 3: 设置 向上 阿杜诺。
完成硬件设置并将 Bolt 连接到云后,上传文件 Bolt_Robot_Car.ino 中的固件 给你的 Arduino。要了解如何设置 Arduino IDE 并将代码上传到 Arduino,请点击此链接。
步骤 4: 控制器 应用。
双击 controller.html 文件,您应该看到以下网页。
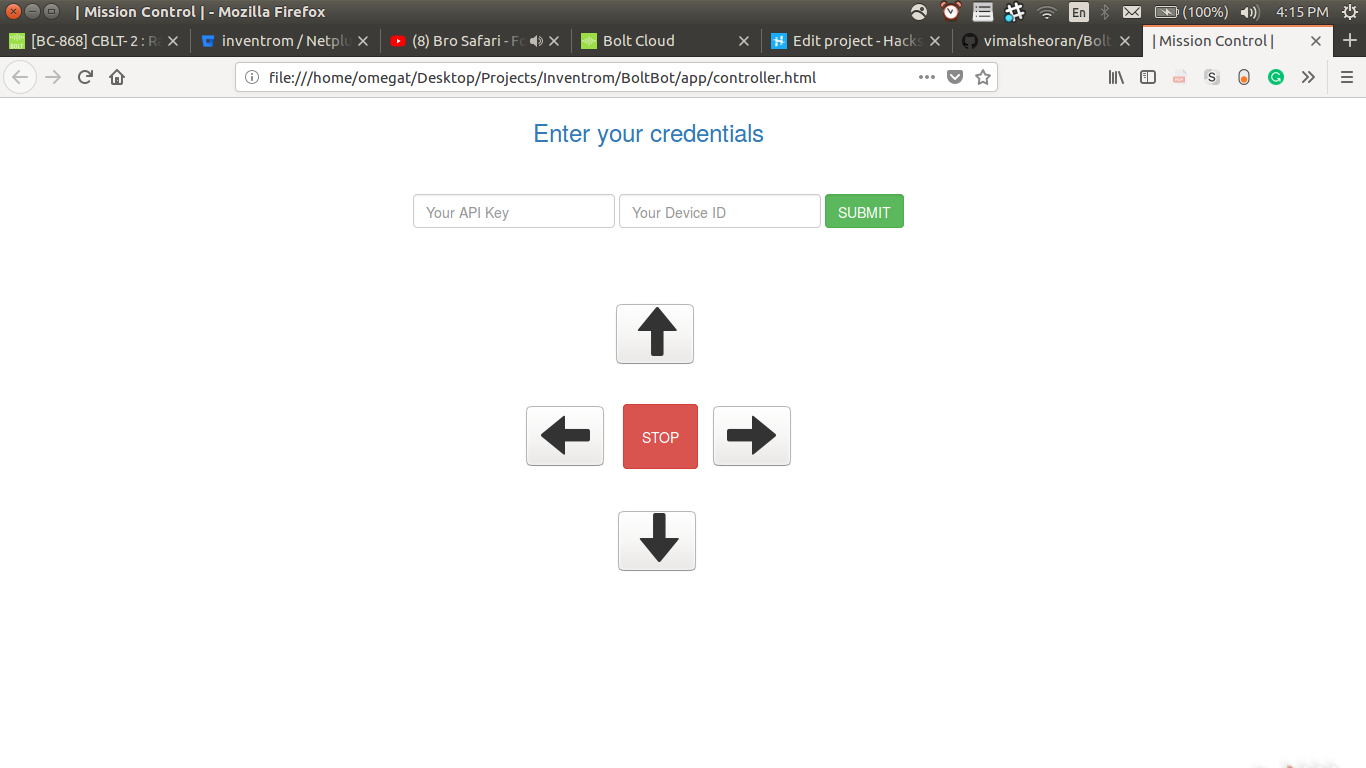
现在输入您的API 密钥 和设备 ID 进入各自的字段,然后点击提交。 您可以获得API 密钥 和设备 ID 来自您的 Bolt 云仪表板。
在此之后,您可以使用控制按钮来控制机器人的运动。按下按钮会触发特定的 JavaScript 功能(检查文件 controller.js ) 将命令发送到 Bolt Cloud,然后发送到您的 Bolt WiFi 模块。现在你有了一个 RC 机器人,你可以用它做什么。可以用它做很多事情,你可以在上面安装几个传感器,或者让它自动或任何你想要的。如果你搞砸了也不要担心,我们 Maker Land 的原住民随时为你提供帮助。
第五幕:复活节彩蛋
我知道你们中的一些人可能会想“嘿,你说有一个奖励功能,它在哪里?”好吧,别担心,我们不会让您高枕无忧,但是您很有可能已经注意到 ActThree:Forging 中的功能 如果你还没有,再看看它。但是,谁有这样的时间,那么 TL;DR 如果您的机器人在其路径上遇到障碍物或障碍物,它会自动停止,这样您就不会将其撞到墙上。好的,这个故事到此结束,请观看此视频以查看此项目的视频教程。
演示:
代码
BoltBot
https://github.com/vimalsheoran/BoltBot示意图
制造工艺