

Arduino Nano:使用操纵杆控制 2 个步进电机
组件和用品
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
应用和在线服务
 |
| |||
 |
|
关于这个项目
构建 Arduino 时 带有步进电机的项目 ,例如数控 机器,绘图仪 , 或 动画艺术 ,有时需要手动控制步进器。模拟操纵杆 是用于手动控制的廉价且简单的模块,具有可变速度。它们似乎是控制 步进器 的不错选择 .用传统的Arduino解决问题 然而代码并非微不足道。
在本教程中,我将向您展示编程 Arduino Nano 是多么容易 使用 Visuino 控制2个步进电机 使用操纵杆 .
第 1 步:组件
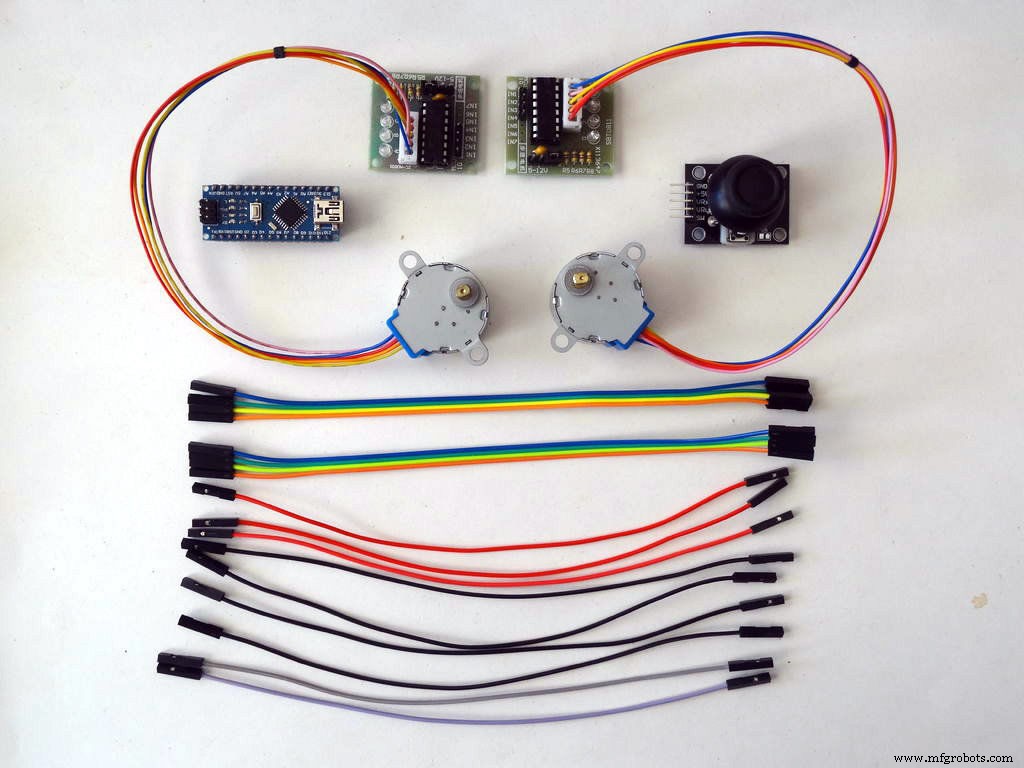
- 一个 Arduino 兼容板(我使用 Arduino Nano,因为我有一个,但任何其他都可以)
- 一个操纵杆 我从这个便宜的 37 个传感器组中得到的
- 两个 5V 步进电机 带有驱动板 (我使用的是 28BYJ-48 步进器和 ULN2003 驱动板)
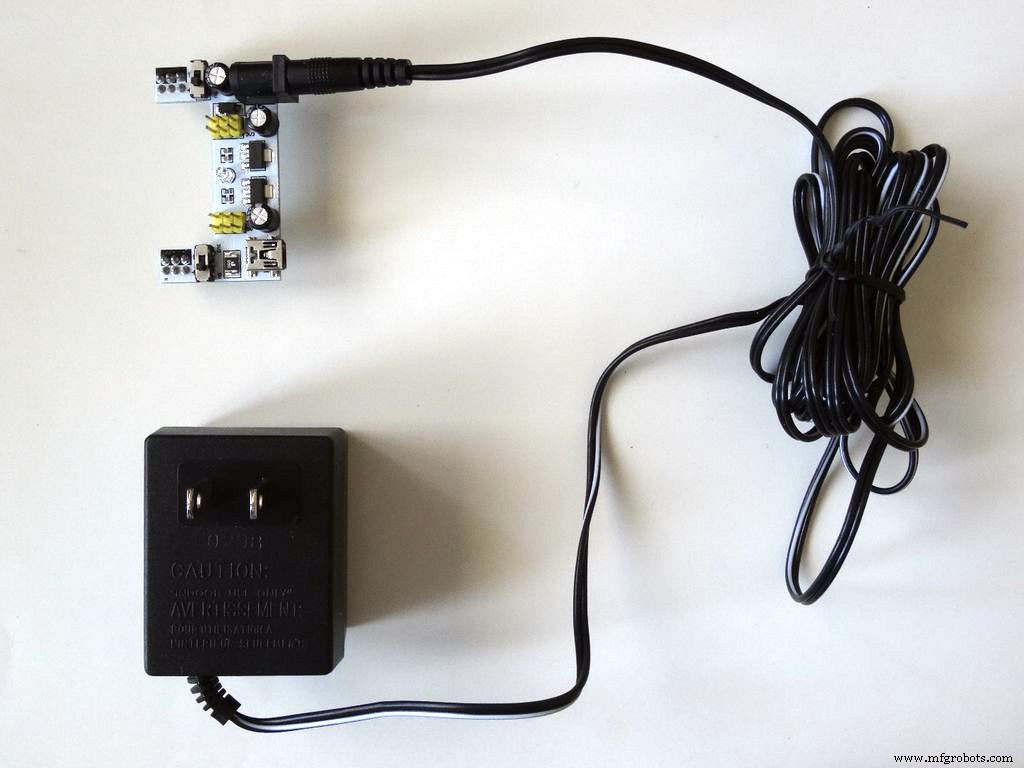
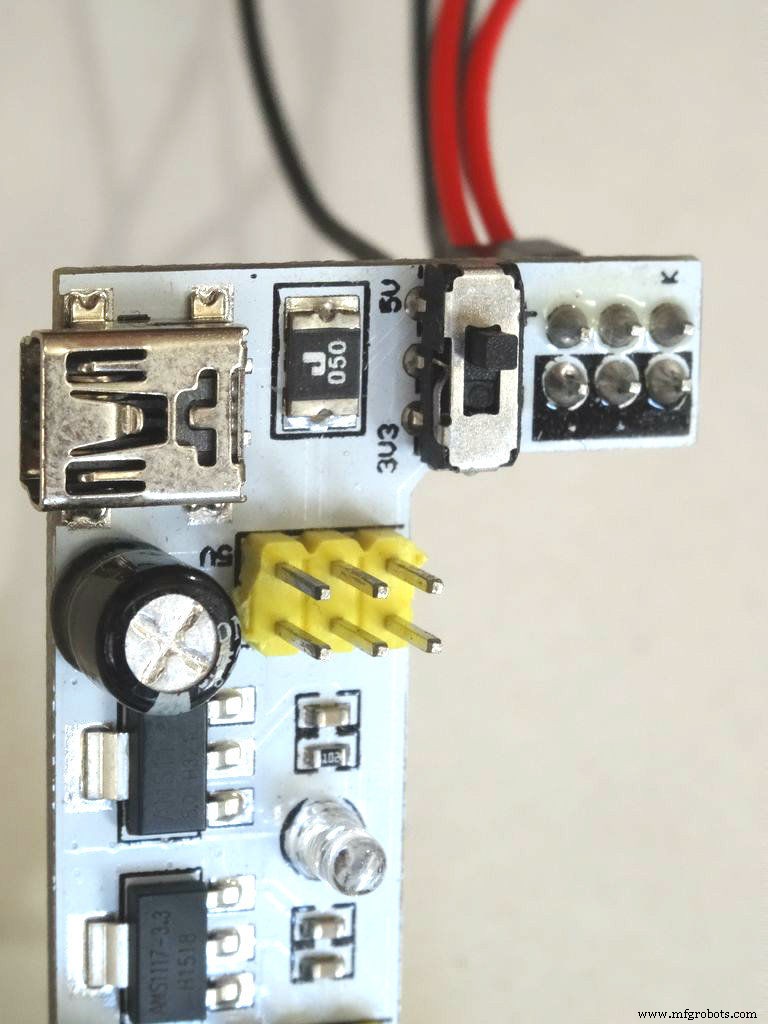
- 一个 K2 面包板电源 带适配器(图片 2 ),或其他 5V 电源用于步进器
- 17 女-女 跳线
第 2 步:连接电源并将步进电机接地
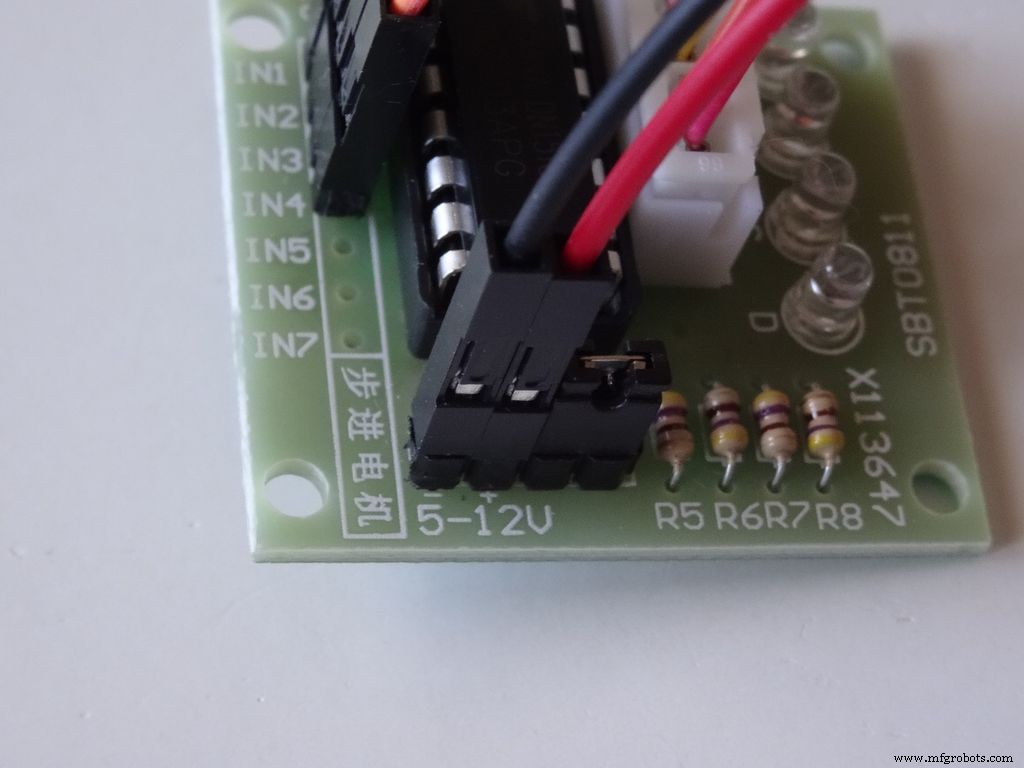

- 连接地面 (黑线 ) 和 电源 (红线 ),到每个步进驱动模块 (图一 )
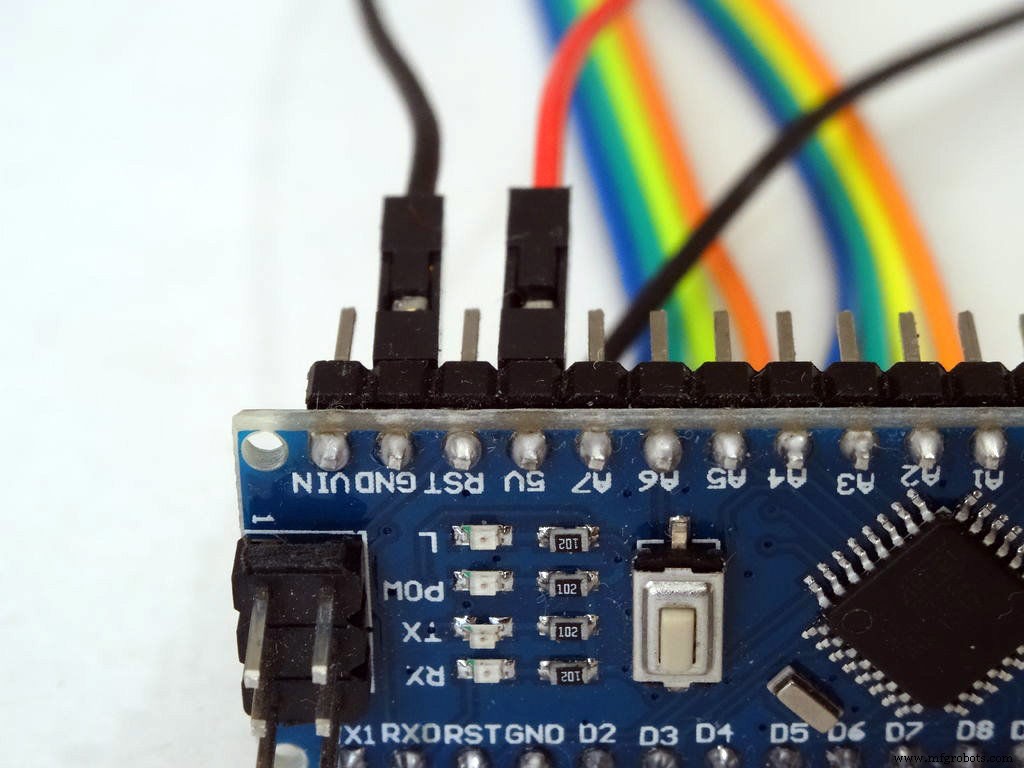
- 连接另一个地面 (黑线 ) 接地 Arduino 的引脚 板(图 2 )
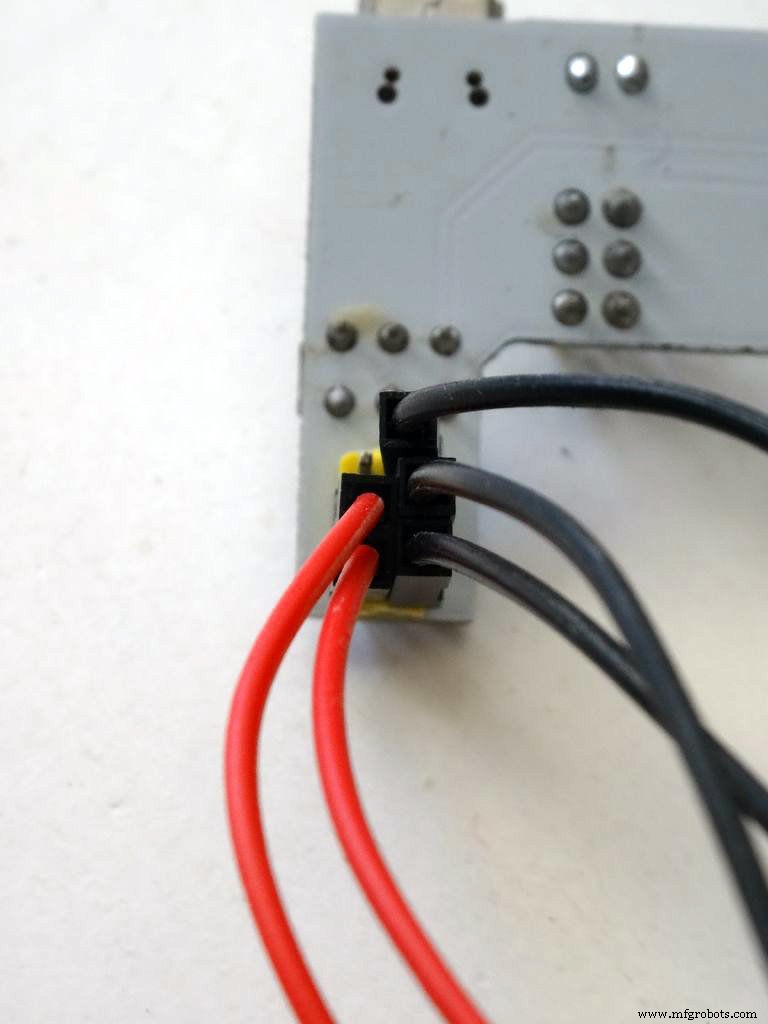
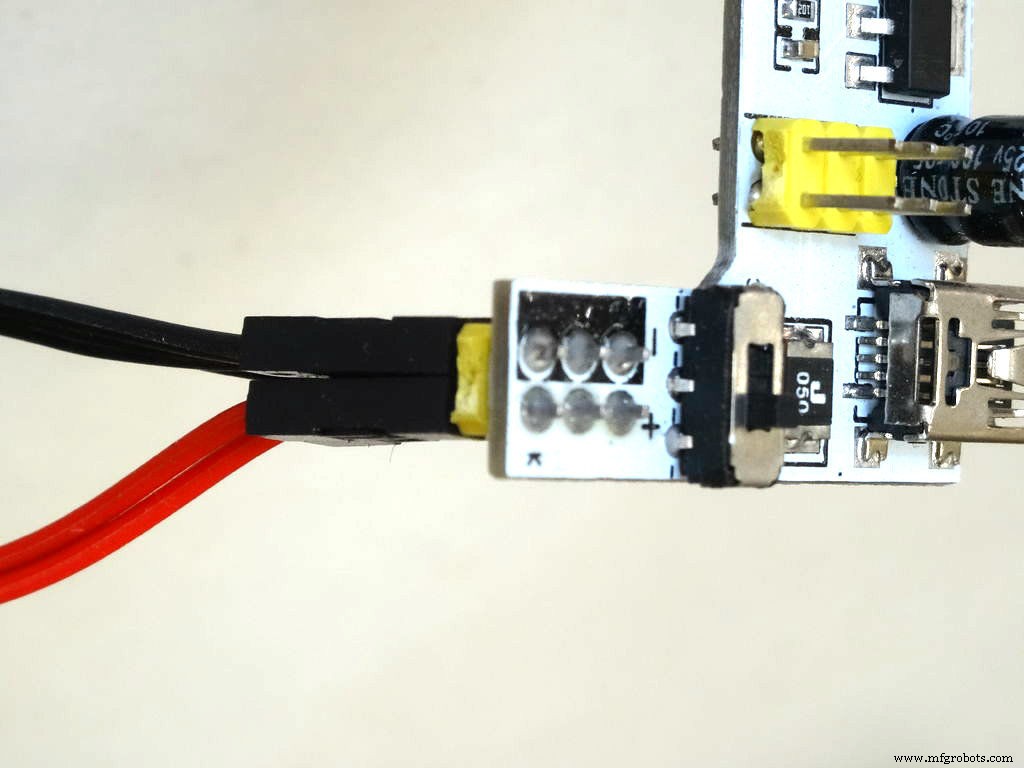
- 连接电源的另一端 (红线 ) 来自电机驱动模块 到“”力量 K2 电源的引脚 (图片 3 和 4 )
- 连接地面的另一端 (黑线 ) 来自电机驱动器模块和 Arduino 到“- " 地面 K2 电源的引脚 (图片 3 和 4 )
- 确保电源选择 开关 K2 电源 设置为 5V (图 5 )
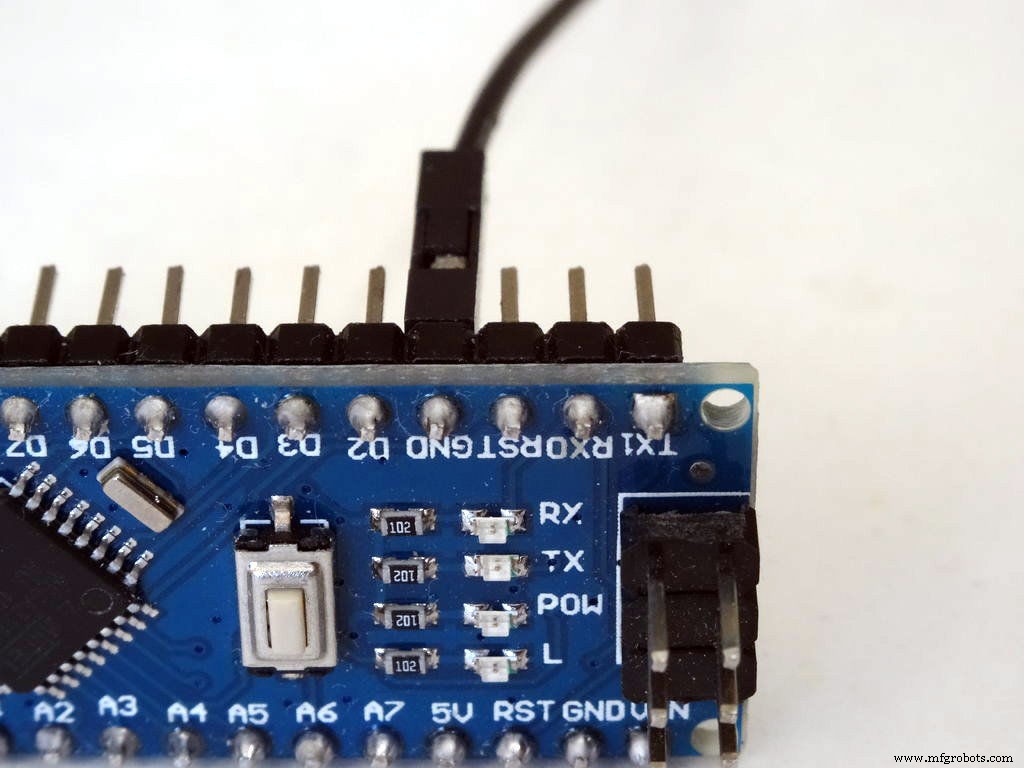
- 图 6 显示地面在哪里 Arduino Nano 的引脚
第 3 步:将步进电机连接到 Arduino

- 如果尚未连接,请将步进电机连接器插入驱动板
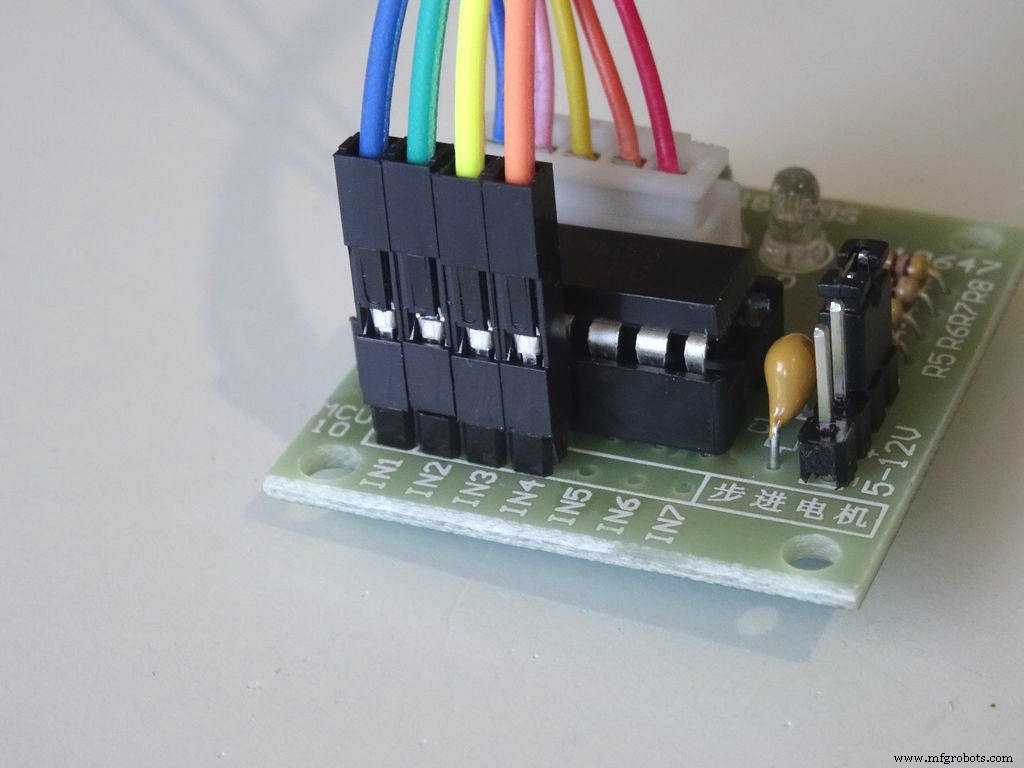
- 连接母-母跳线的一端 (蓝、绿、黄和橙线 ) 到 IN1 到 IN4 引脚 步进驱动器 对于第一电机 (图一 )
- 连接母-母跳线的一端 (蓝、绿、黄和橙线 ) 到 IN1 到 IN4 引脚 步进驱动器 对于第二个马达 (图一 )
- 连接IN1 线 来自第一马达 (蓝线 ) 到 数字引脚 2 Arduino 板(图 2 )
- 连接IN2 线 来自第一马达 (绿线 ) 到 数字引脚 3 Arduino 板(图 2 )
- 连接IN3 线 来自第一马达 (黄线 ) 到 数字引脚 4 Arduino 板(图 2 )
- 连接IN4 线 来自第一马达 (橙线 ) 到 数字引脚 5 Arduino 板(图 2 )
- 连接IN1 线 来自第二个马达 (蓝线 ) 到 数字引脚 6 Arduino 板(图 3 )
- 连接IN2 线 来自第二个马达 (绿线 ) 到 数字引脚 7 Arduino 板(图 3 )
- 连接IN3 线 来自第二个马达 (黄线 ) 到 数字引脚 8 Arduino 板(图 3 )
- 连接IN4 线 来自第二个马达 (橙线 ) 到 数字引脚 9 Arduino 板(图 3 )
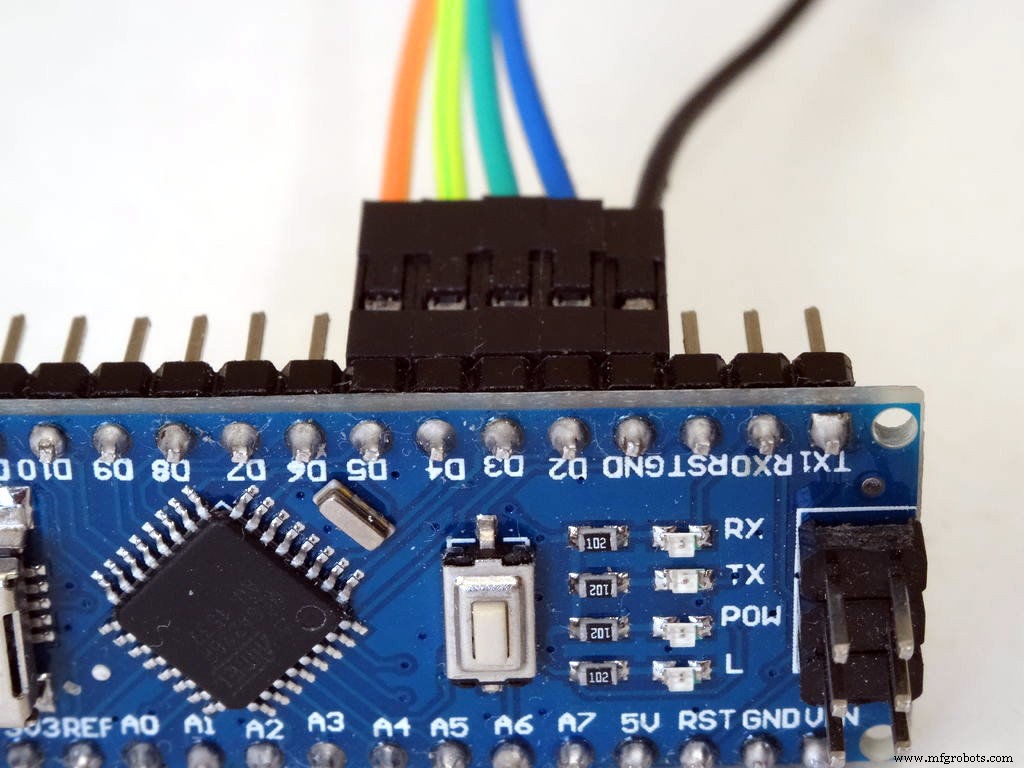
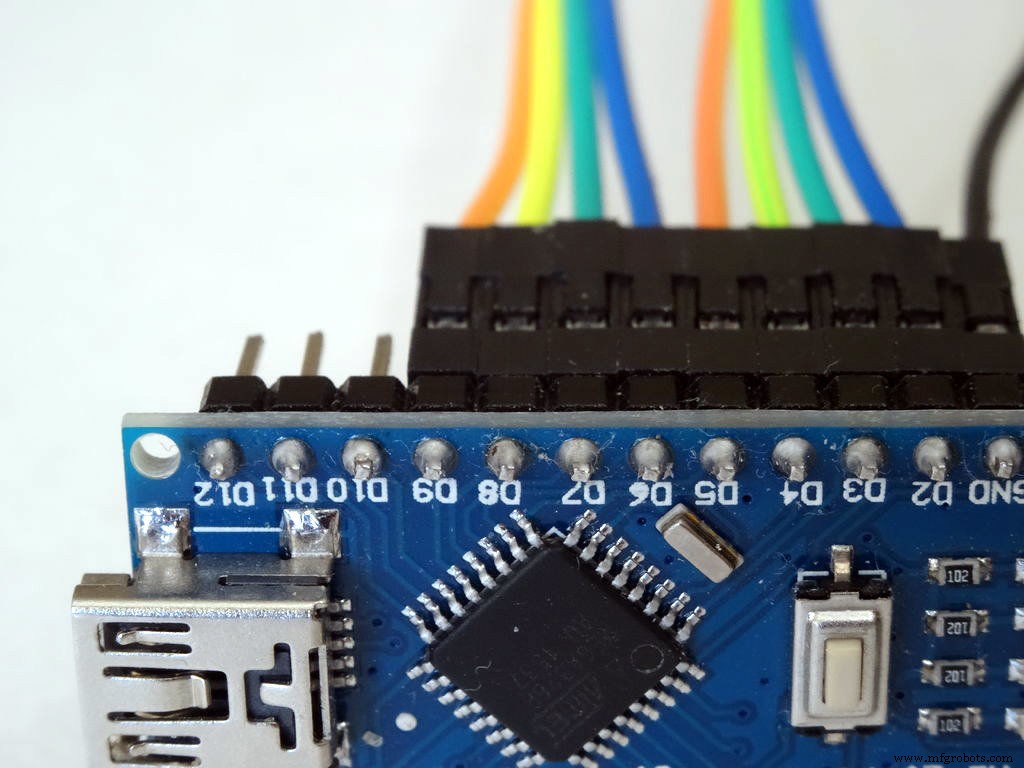
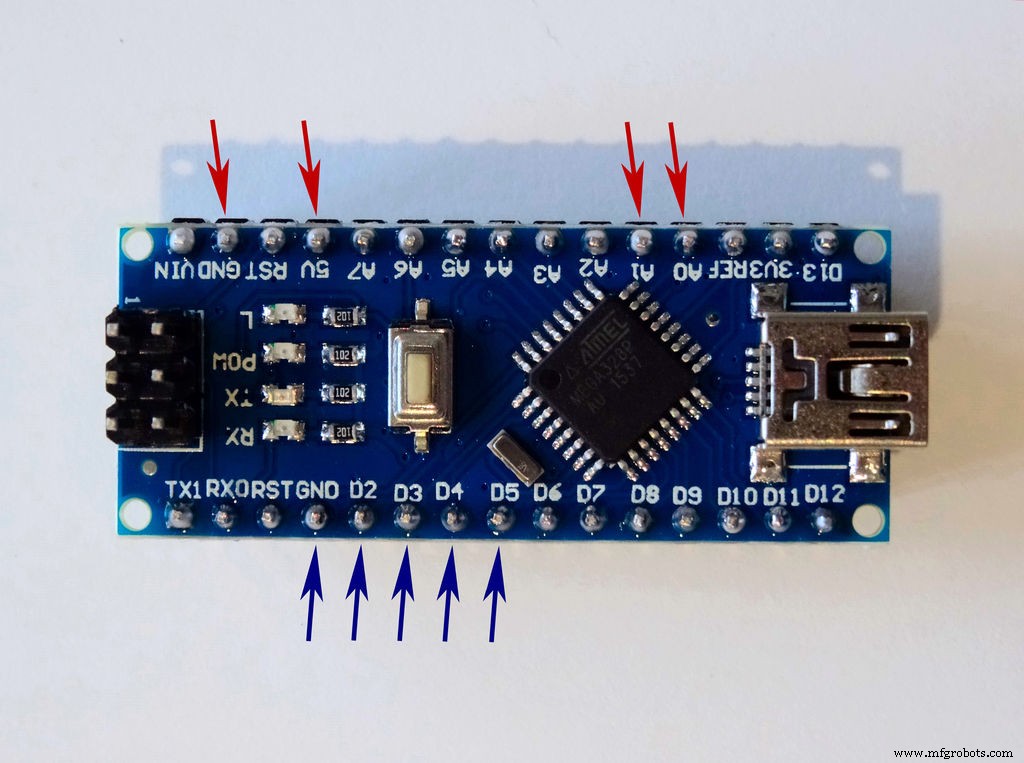
- 图 4 显示为红色 数字 2 到数字 9 在哪里 Arduino Nano 的引脚。蓝色显示了在上一步中完成的连接。
第 4 步:将操纵杆连接到 Arduino
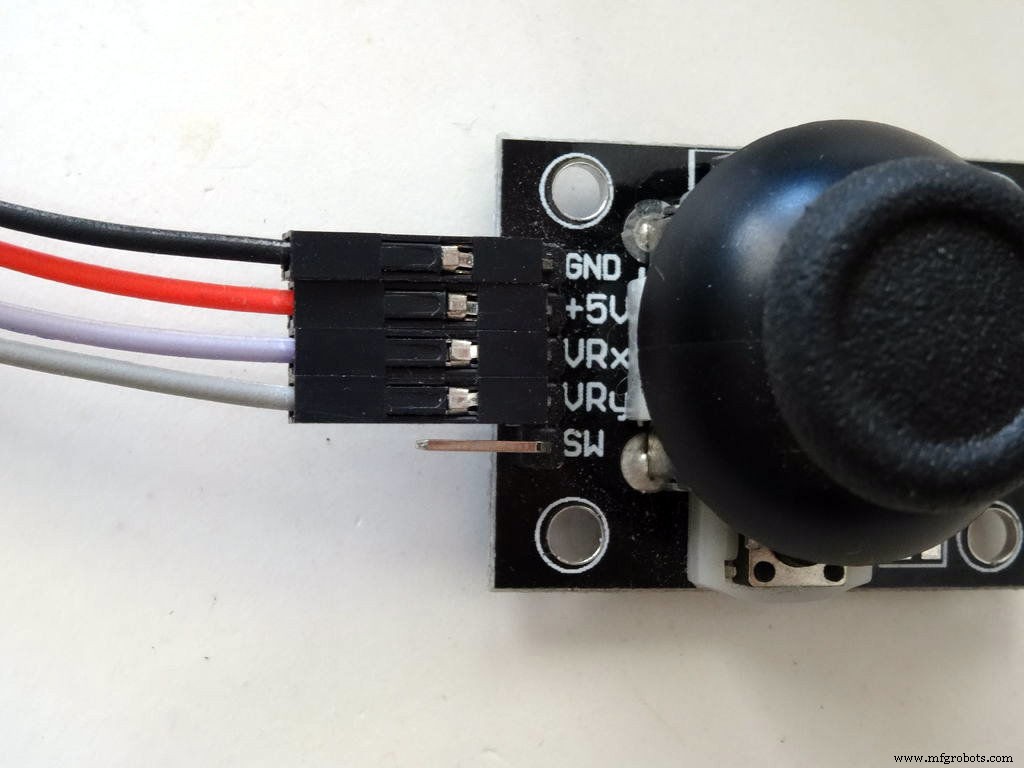
- 联系女性-女性 连接到地的电线 (黑线 ), 功率 (红线 ), VRx (紫线 ) 和 VRy (灰线 ) 操纵杆 如图1所示
- 连接地线 (黑线 ) 到 地面 Arduino 的引脚 板(图 2 )
- 连接电源线 (红线 ) 到 5V Arduino 的电源引脚 (图二 )
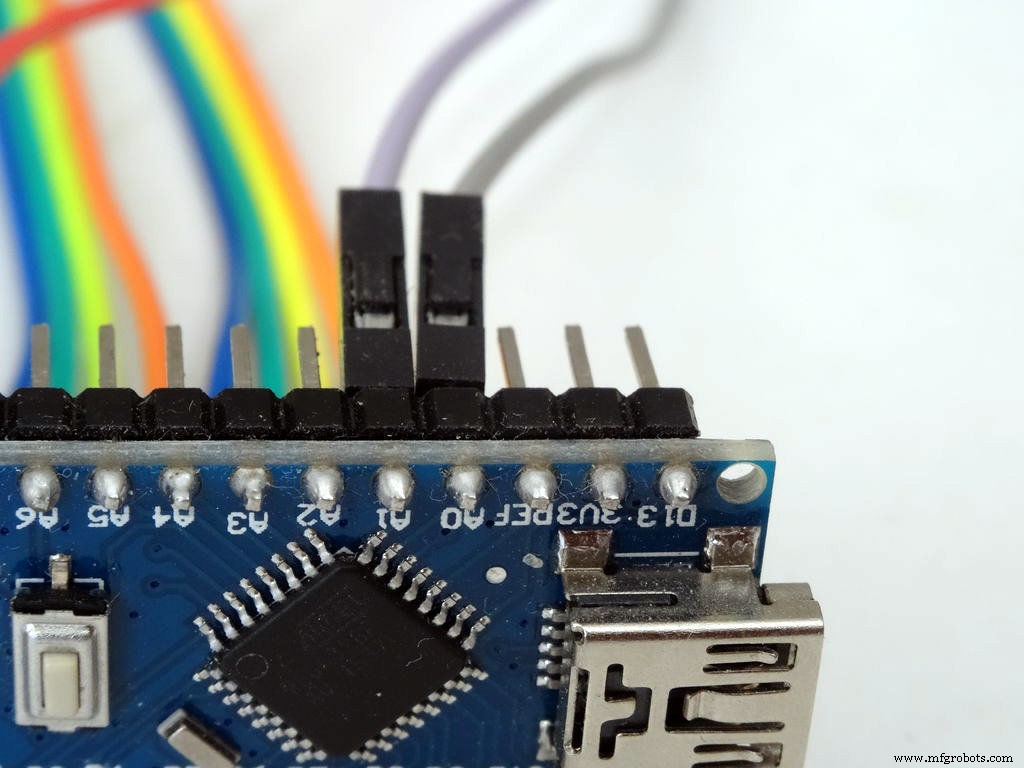
- 连接 VRx 线 (棕线 ) 模拟 1 Arduino 的引脚 板(图 3 )
- 连接 VRy 线 (灰线 ) 模拟 0 Arduino 的引脚 板(图 3 )
- 图 4 显示为红色 地面在哪里 , 5V 电源,模拟 0 , 和模拟 1 Arduino Nano 的引脚。蓝色显示了在前面的步骤中完成的连接。
第五步:启动Visuino,选择Arduino Board类型
要开始对 Arduino 进行编程,您需要拥有 Arduino IDE 从这里安装:http://www.arduino.cc/。
请确保安装 1.6.7 更高版本,否则本教程将无法运行!
Visuino :https://www.visuino.com 也需要安装。
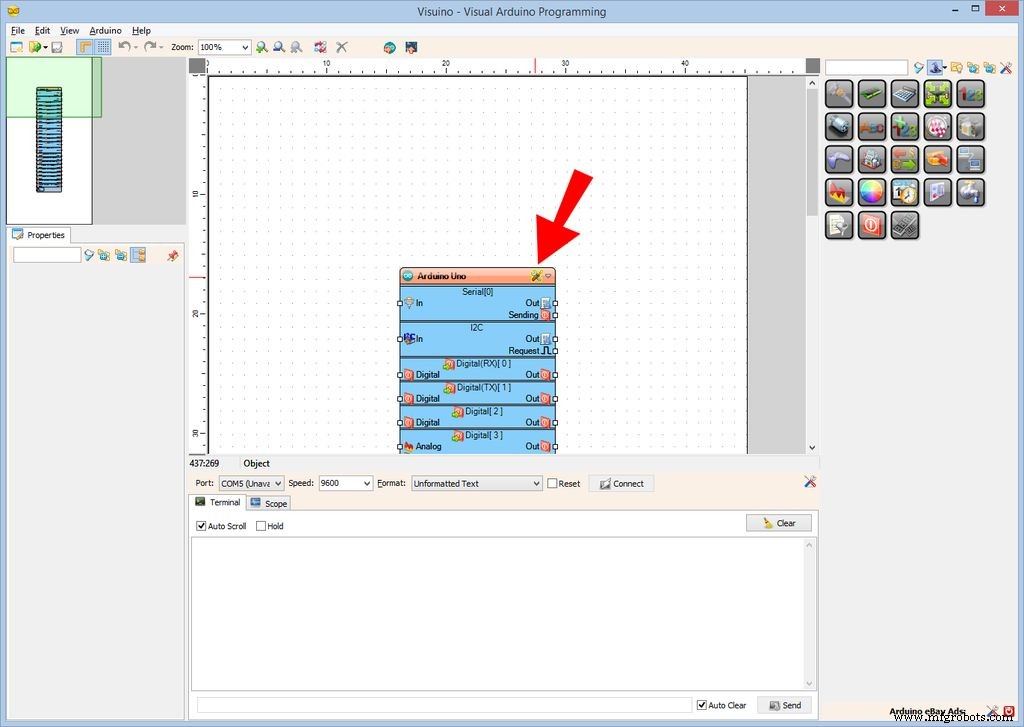
- 启动 Visuino 如第一张图
- 点击“工具 " Arduino 组件上的按钮(图片 1 ) 在 Visuino 中
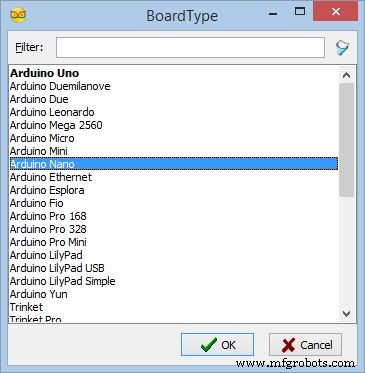
- 出现对话框时,选择 Arduino Nano 如图2所示
第 6 步:在 Visuino 中:添加并连接步进电机组件
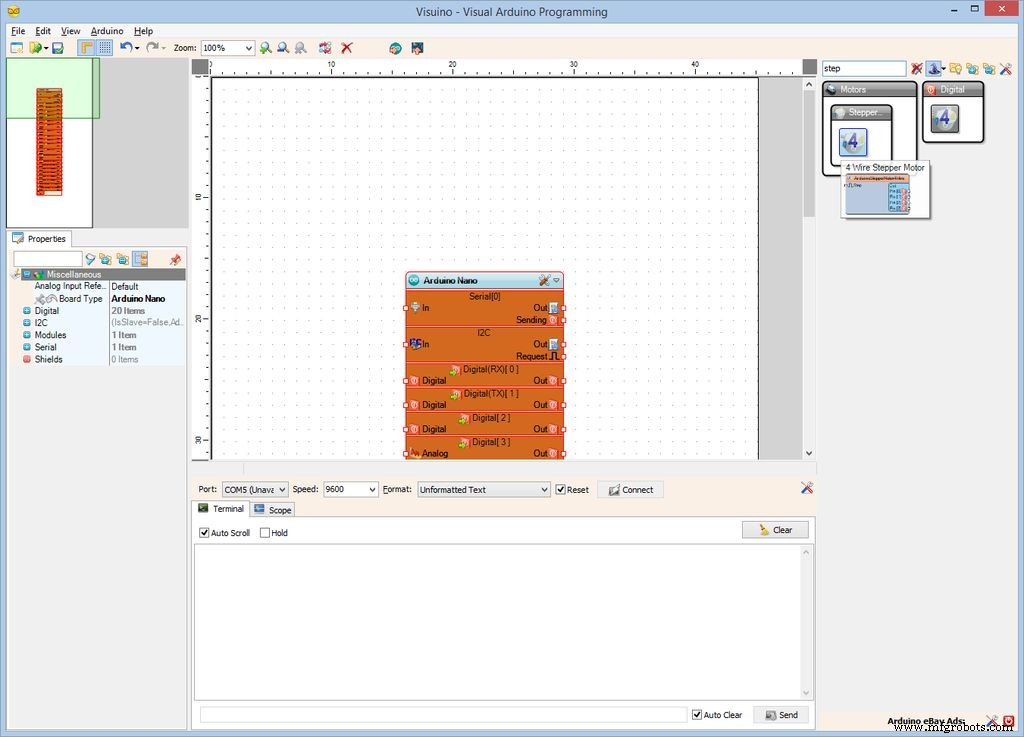

首先我们需要添加组件来控制步进电机:
- 输入“步骤 “在组件工具箱的过滤器框中,然后选择“4 Wire Stepper Motor " 组件(图 1 ),然后删除其中两个 它在设计区域
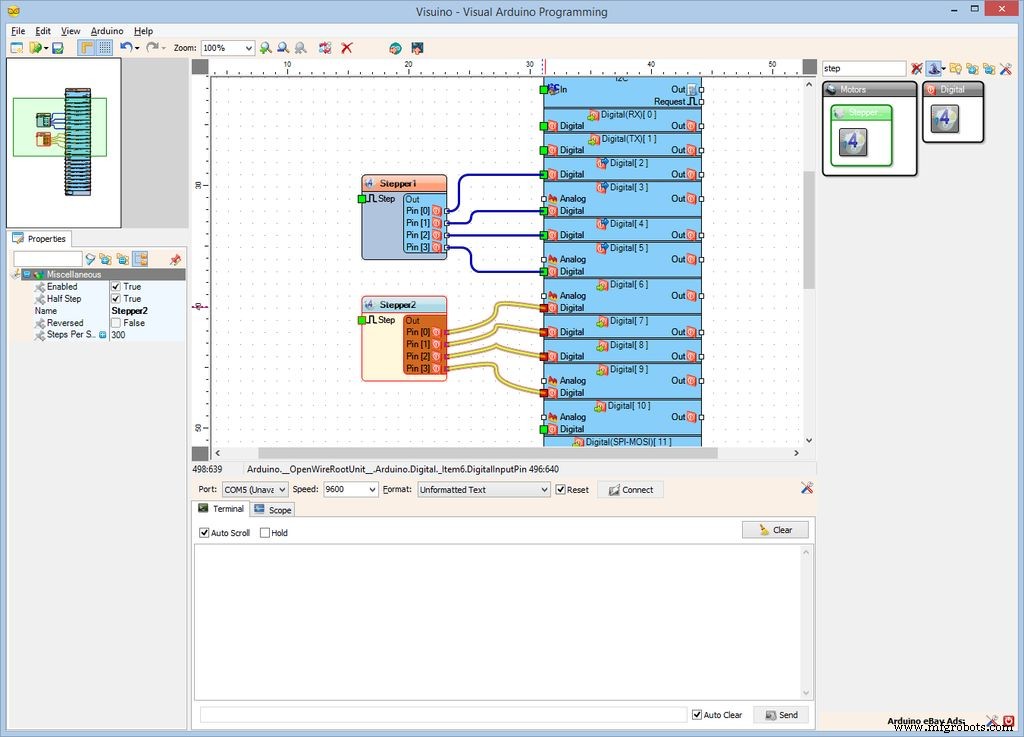
- 点击“出 " 盒子 包含 Stepper1 的引脚 组件一次开始连接所有输出引脚(图片 2 )
- 将鼠标移到“数字 "Digital[2] 的输入引脚 "Arduino 的频道 零件。 Visuino 将自动展开电线,以便它们正确连接到其余引脚(图片 2 )
- 点击“出 " 盒子 包含 Stepper2 的引脚 组件立即开始连接所有输出引脚(图片 3 )
- 将鼠标移到“数字 "Digital[6] 的输入引脚 "Arduino 的频道 零件。 Visuino 将自动展开电线,以便它们正确连接到其余的引脚(图片 3 )
第七步:在 Visuino 中:设置步进电机组件属性,并添加引脚来控制速度
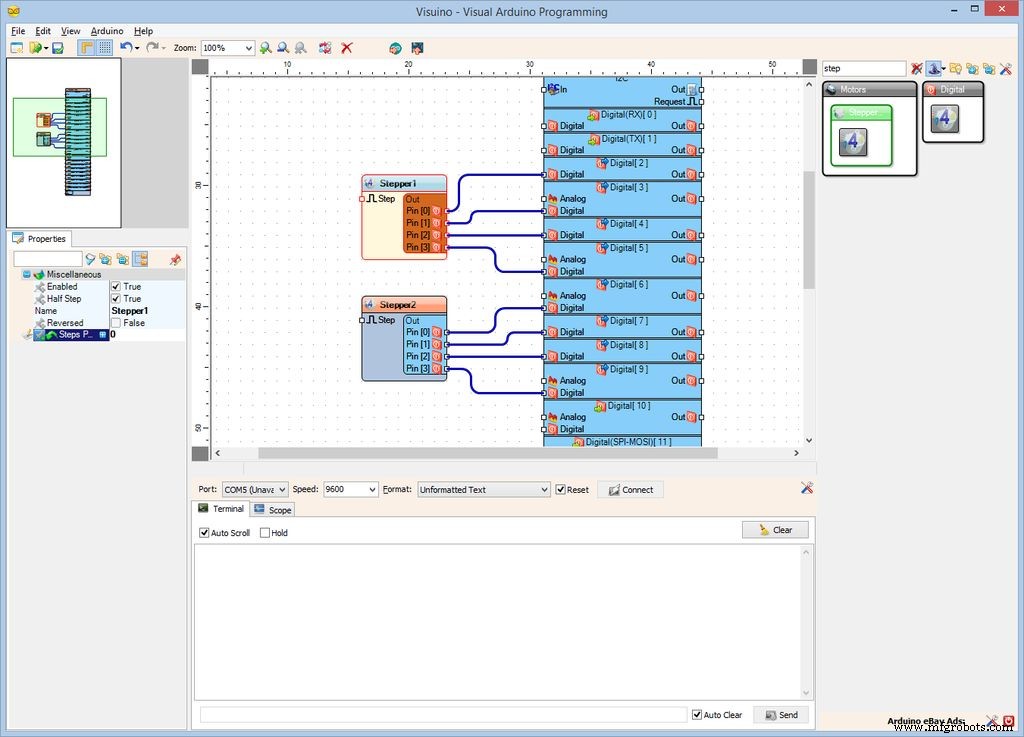
由于我们要控制步进器的速度,因此需要在“Steps Per Second”属性中添加引脚:
- 选择 Stepper1 组件(图 1 )
- 在对象检查器中,设置“Steps Per Second”的值 " 属性为 "0 " (图 1 )
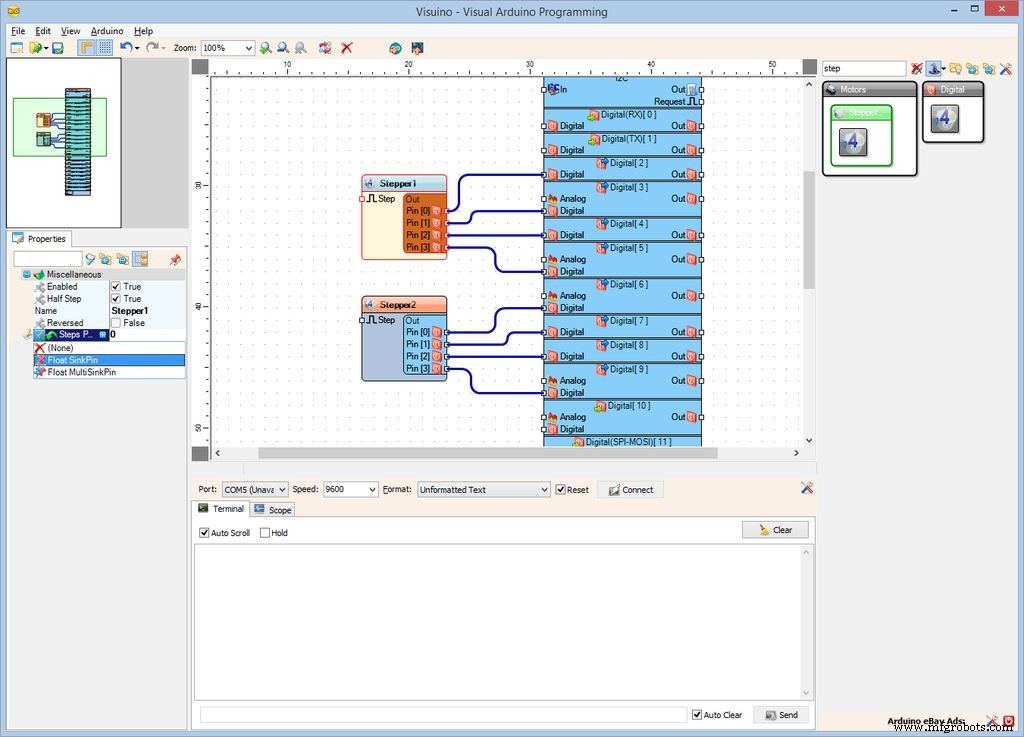
- 在 Object Inspector 中点击 Pin “每秒步数”前面的按钮 " 属性,然后选择 "Float SinkPin " (图 2 )
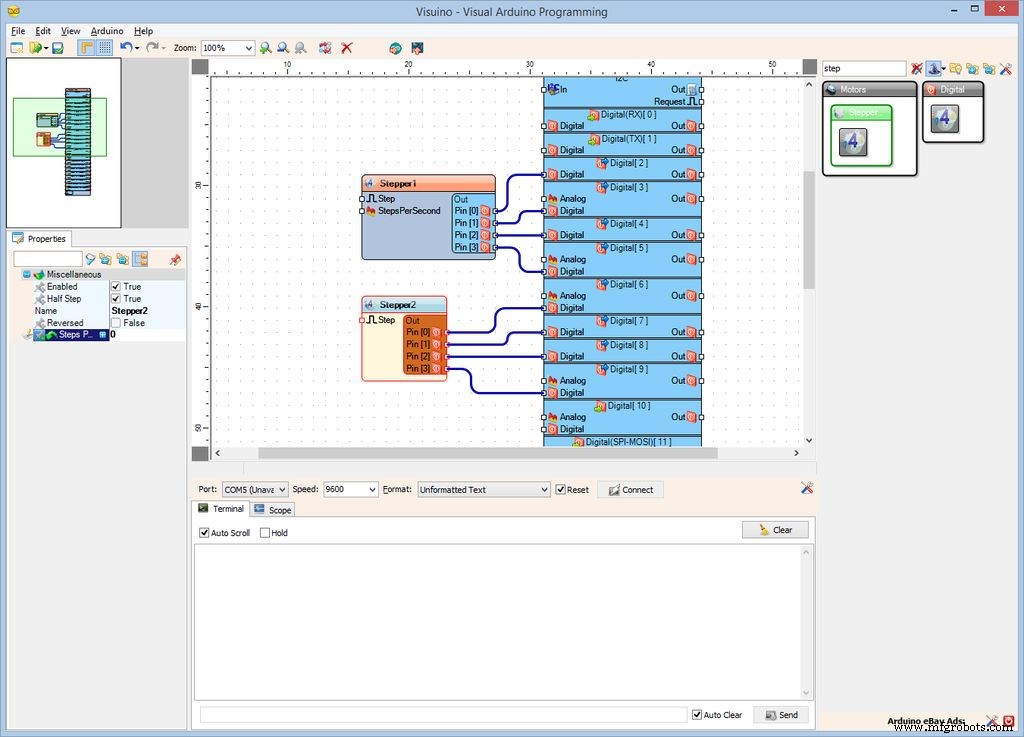
- 选择 Stepper2 组件(图 3 )
- 在对象检查器中,设置“Steps Per Second”的值 " 属性为 "0 " (图 3 )
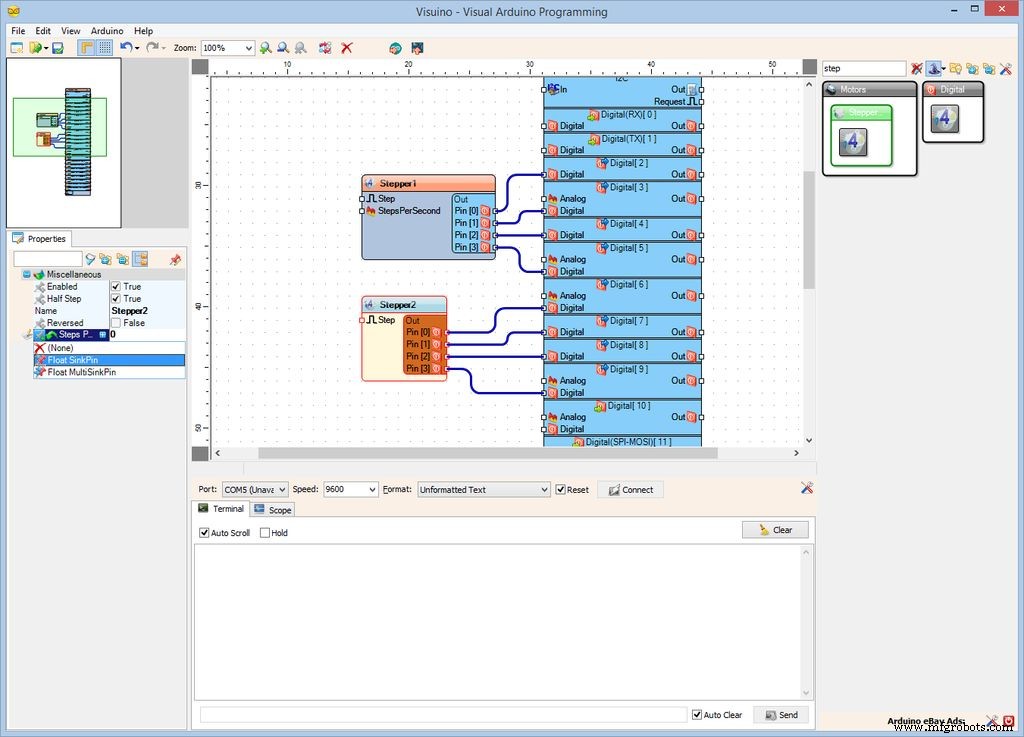
- 在 Object Inspector 中点击 Pin “每秒步数”前面的按钮 " 属性,然后选择 "Float SinkPin " (图 4 )
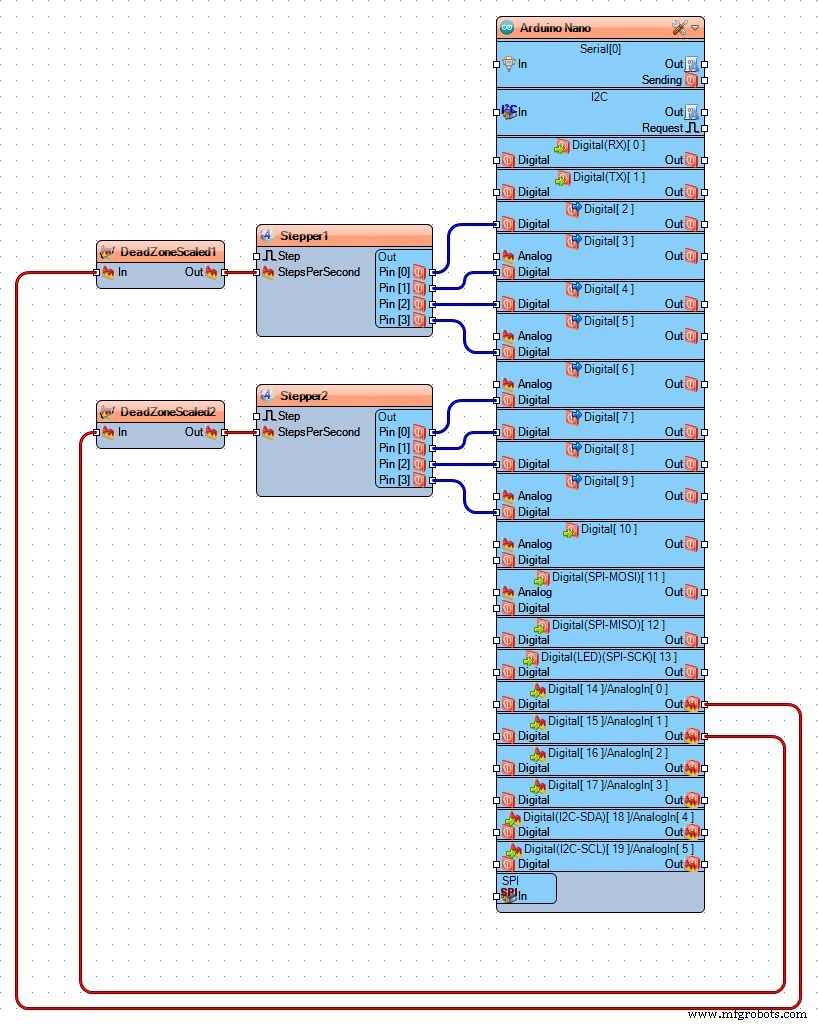
第 8 步:在 Visuino 中:添加并连接死区缩放模拟组件
连接操纵杆的模拟引脚生成 0.0 和 1.0 之间的归一化值。我们需要将它们转换为每秒 +/-300 步。由于摇杆在释放中心位置时不是很精确,我们希望中心周围的小区域被认为是 0.5,因此我们需要引入“死区”:
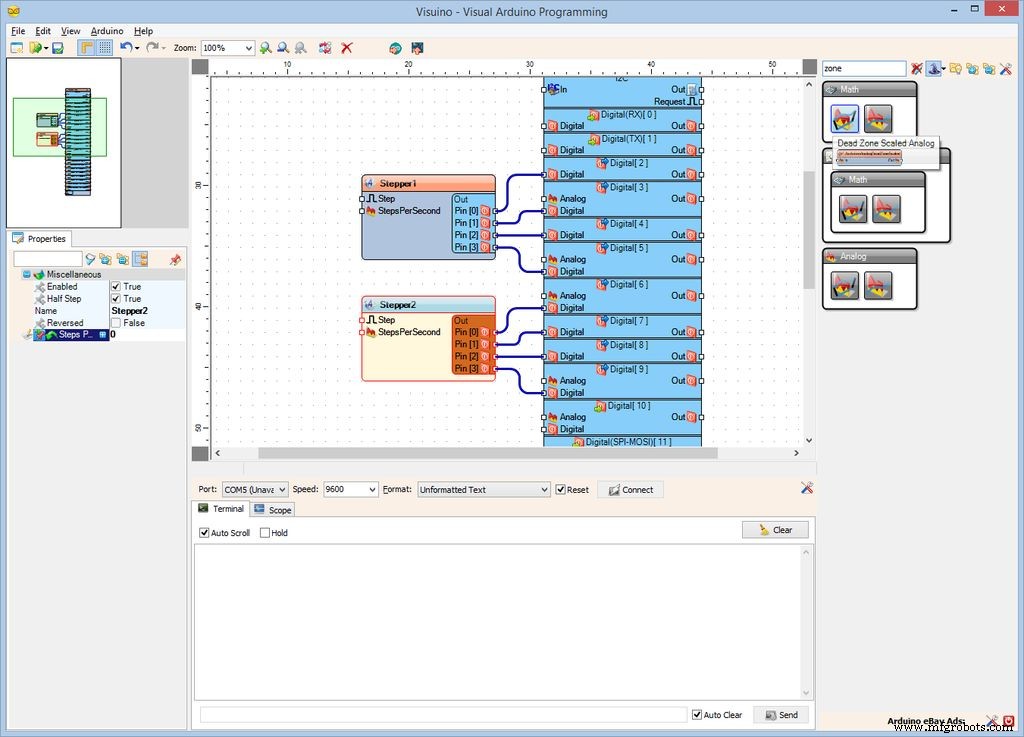
- 输入“区域 “在组件工具箱的过滤器框中,然后选择“死区缩放模拟 " 组件(图 1 ),然后删除其中两个 它在设计区域
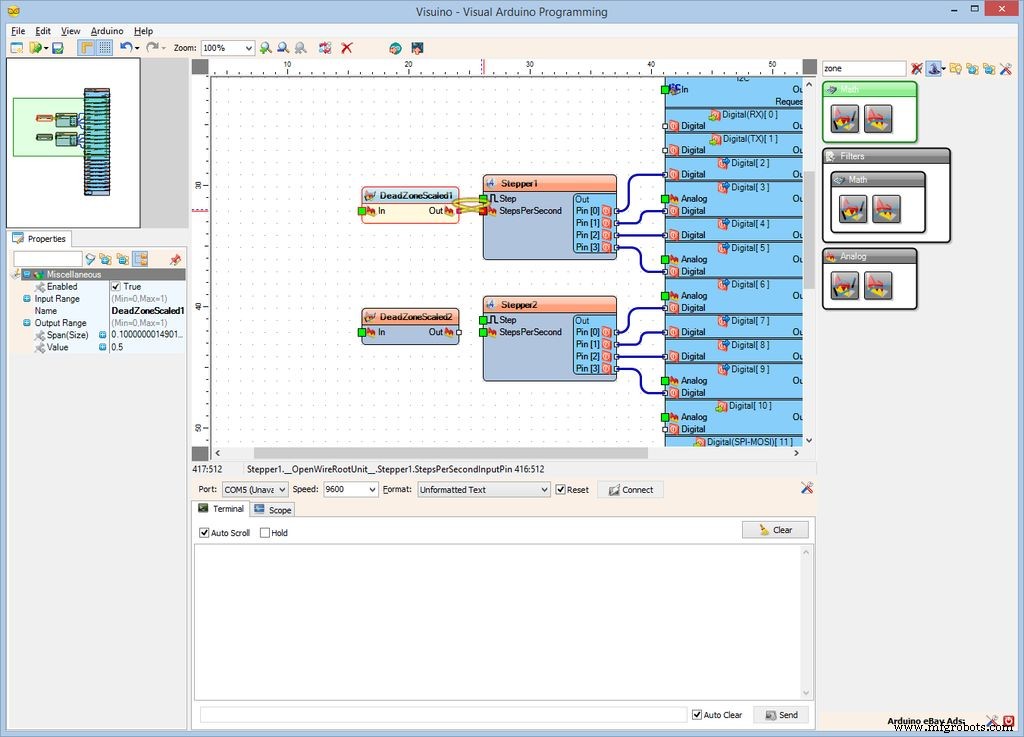
- 连接“输出 " DeadZoneScaled1 的输出引脚 组件到“StepsPerSecond " Stepper1 的输入引脚 组件(图 2 )
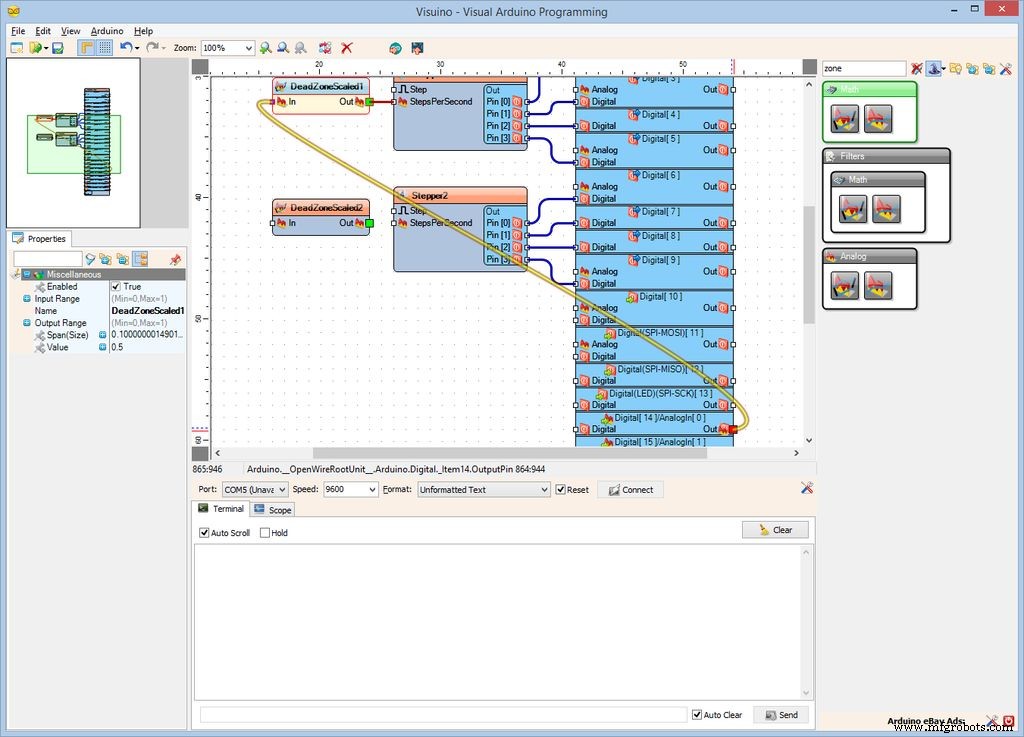
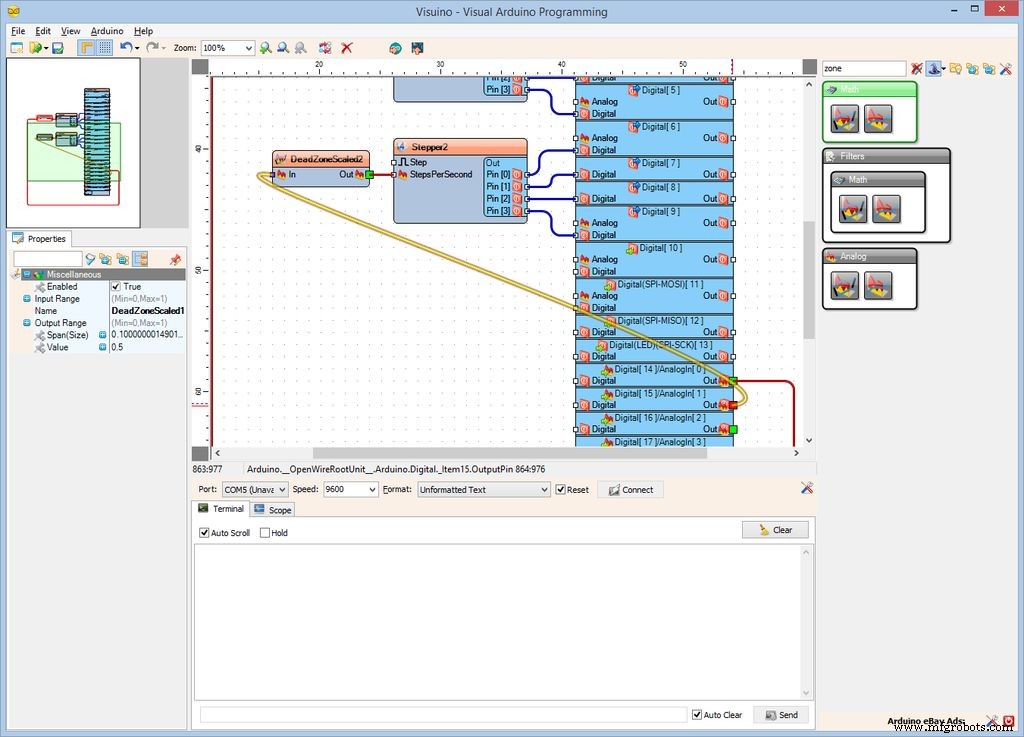
- 连接“输出 “数字[14]/模拟[0]的输出引脚 "Arduino 的频道 组件到“In " DeadZoneScaled1 的输入引脚 组件(图 3 )
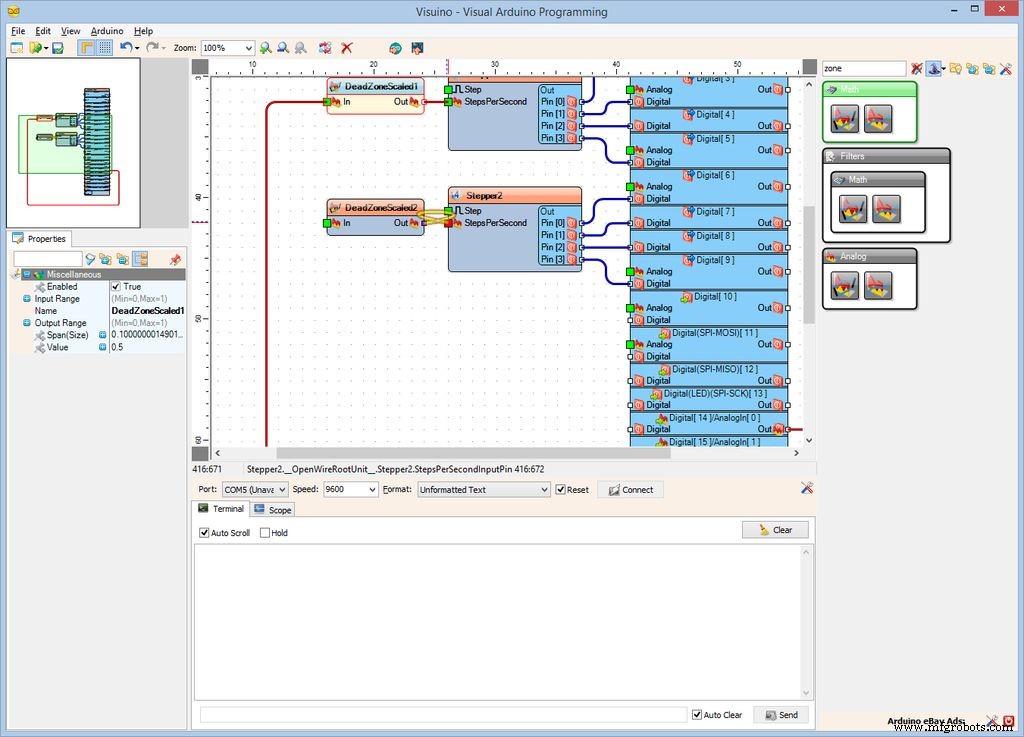
- 连接“输出 " DeadZoneScaled2 的输出引脚 组件到“StepsPerSecond " Stepper2 的输入引脚 组件(图 4 )
- 连接“输出 “数字[15]/模拟[1]的输出引脚 "Arduino 的频道 组件到“In " DeadZoneScaled2 的输入引脚 组件(图 5 )
第 9 步:在 Visuino 中:设置死区缩放模拟组件的属性
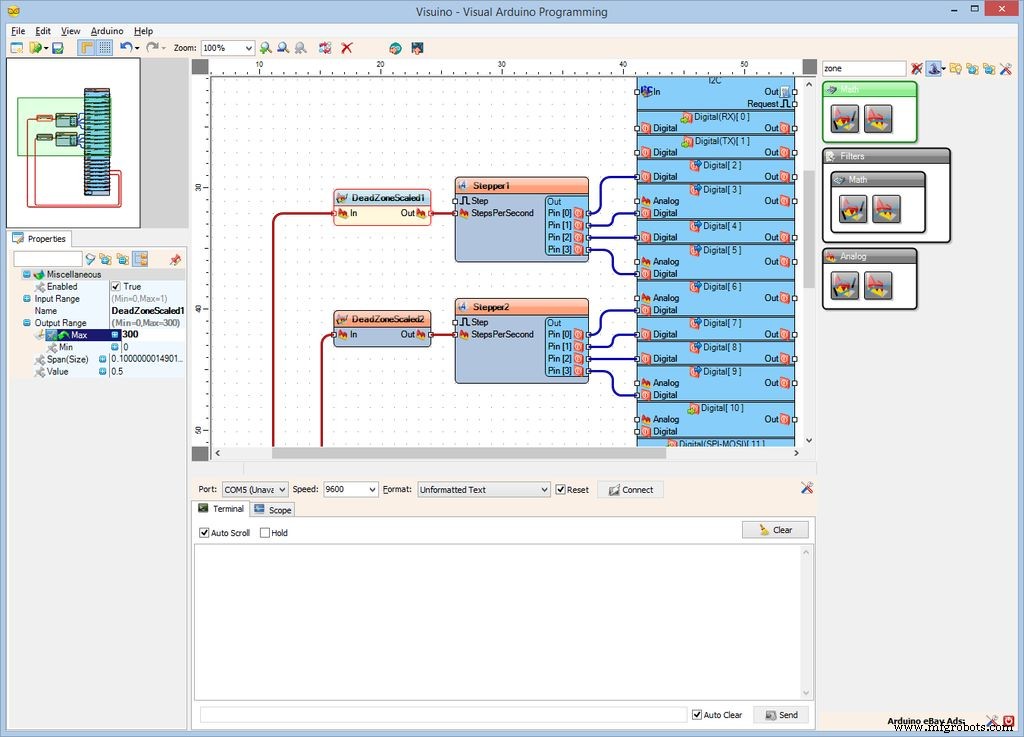
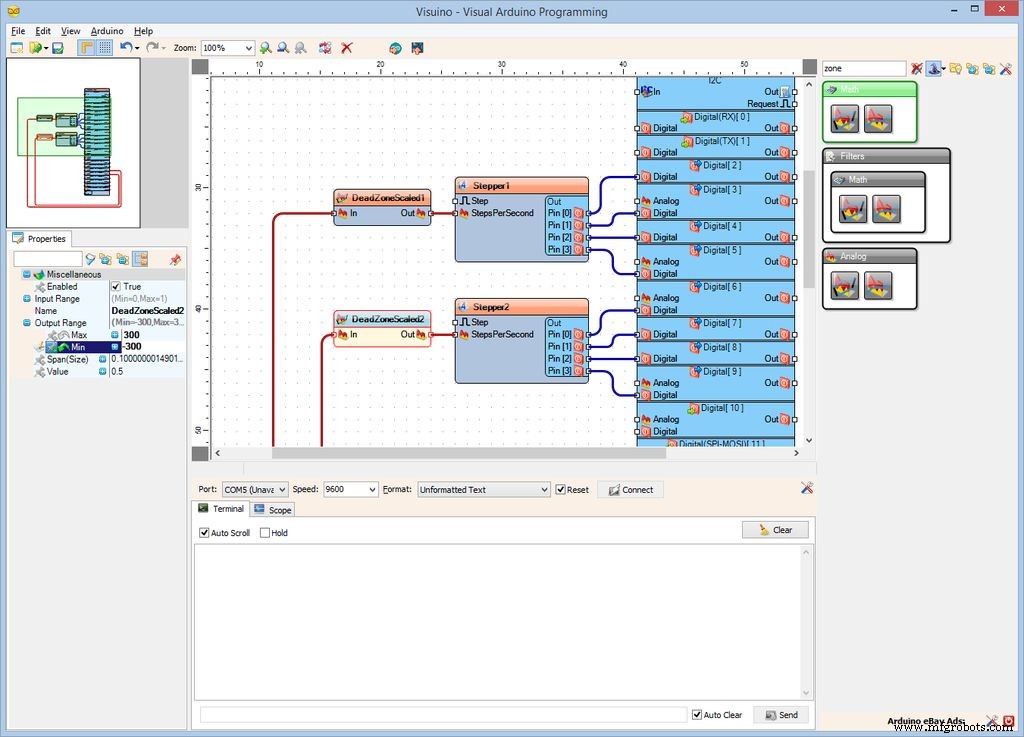
- 在设计区域中,选择 DeadZoneScaled1 组件(图 1 )
- 在对象检查器中,展开“输出范围 " 属性(图 1 )
- 在对象检查器中,设置“Max”的值 "输出范围的子属性 " 属性为 "300 " (图 1 )
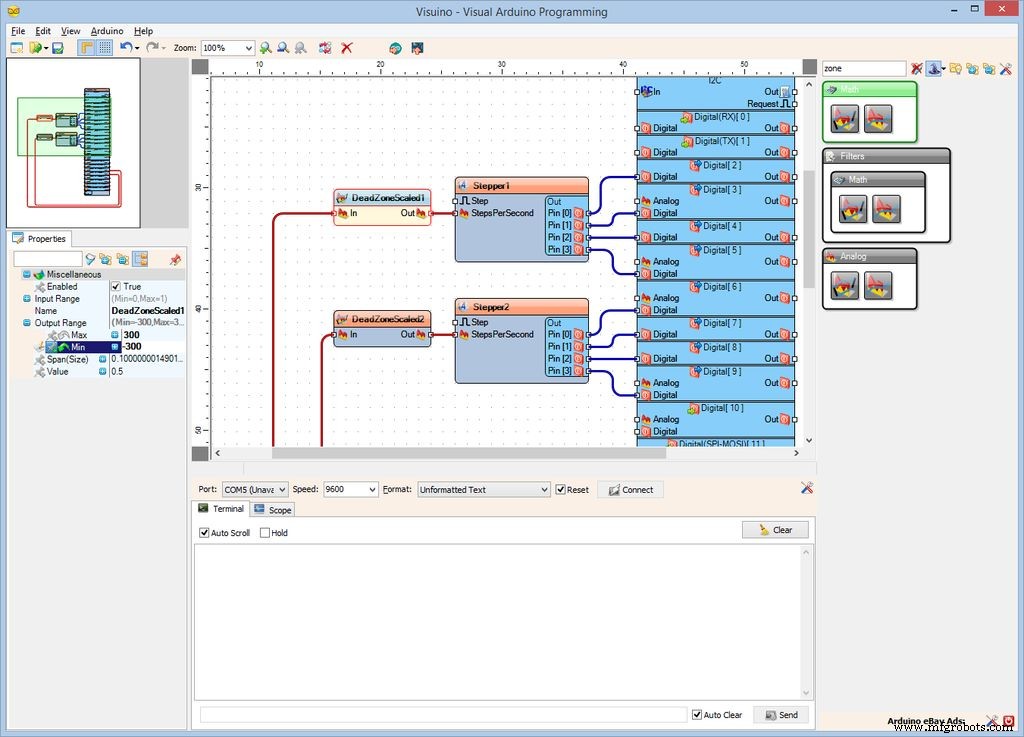
- 在对象检查器中,设置“Min "输出范围的子属性 " 属性为 "-300 " (图 2 )
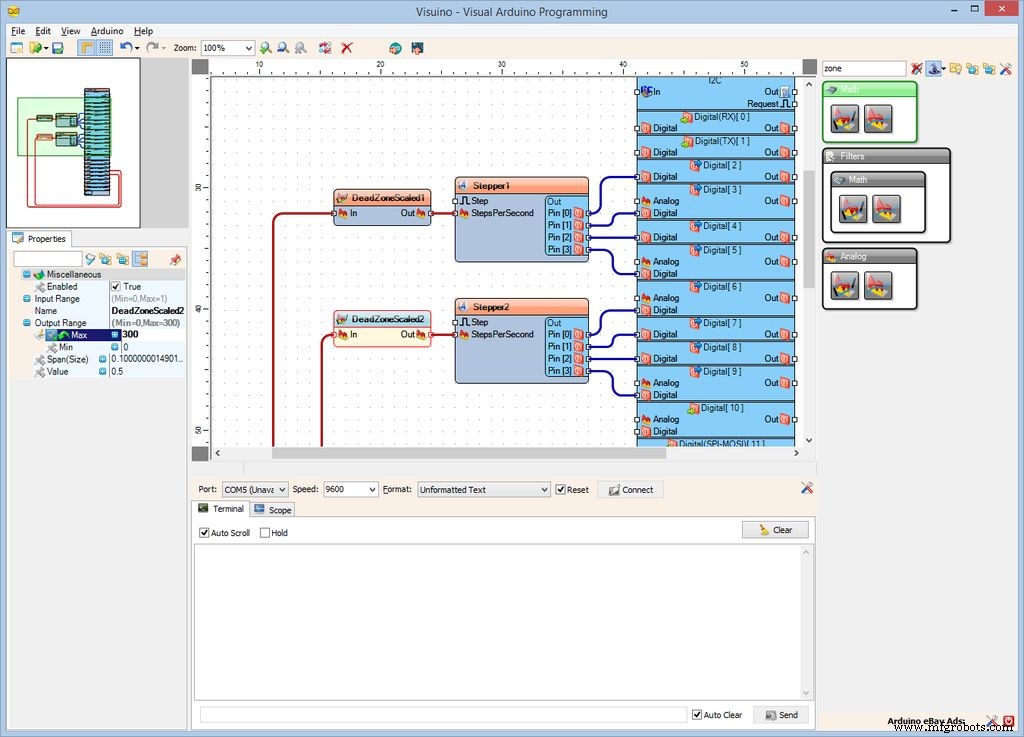
- 在设计区域中,选择 DeadZoneScaled2 组件(图 3 )
- 在对象检查器中,展开“输出范围 " 属性(图 3 )
- 在对象检查器中,设置“Max”的值 "输出范围的子属性 " 属性为 "300 " (图 3 )
- 在对象检查器中,设置“Min "输出范围的子属性 " 属性为 "-300 " (图 4 )
第 10 步:生成、编译和上传 Arduino 代码
- 在 Visuino 中 , 按 F9 或点击图片1上显示的按钮 生成 Arduino 代码,并打开 Arduino IDE
- 在 Arduino IDE 中 ,点击上传 按钮,编译和上传代码(图片2 )
第 11 步:然后玩……

恭喜! 您已完成该项目。
图一 和视频 显示连接并通电的项目。
您可以控制步进器 使用操纵杆 如视频所示 .向上移动 操纵杆 和向下 将控制前进 和向后 步进器之一的旋转 .向左移动 操纵杆 和对 将控制其他步进器 .
在图片2 你可以看到完整的Visuino 示意图。
还附上了 Visuino 我为本教程创建的项目。您可以在 Visuino 中下载并打开它 :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
制造工艺