

一种用于触觉传感的基于纳米光栅的柔性和可拉伸波导
摘要
基于光波导和柔性光学材料的相关特性,提出了一种面向触觉感知的柔性可拉伸光波导结构。光波导的传感原理是基于输出光损失引起的机械变形。它克服了传统光波导器件无法适应不规则表面的缺点。柔性可拉伸光波导采用纳米复制成型方法制造,已应用于触觉传感领域的压力和应变测量。柔性可伸缩光波导的应变检测范围为0~12.5%,外力检测范围为0~23 × 10 –3 N.
介绍
光波导是一种引导光波传输的结构[1,2,3,4]。传统的刚性光波导无法满足柔性电子和软机器人的要求 [5,6,7]。柔性和可伸缩设备将成为机器人触觉传感系统的重要组成部分,它可以实现人机交互的感知,并具有高度的柔性、可伸缩性、适应性、灵敏度、生物相容性和抗电磁干扰[8, 9、10、11、12]。王等人。制备了基于 Ti3C2/MC 生物复合膜的仿生柔性压力传感器,压力灵敏度为 24.63 kPa -1 和丝 Fibroin-MXene 薄膜也被用作具有生物相容性和高性能的压力传感器 [13, 14]。冉等人。制作了一种柔性仿生红外(IR)检测放大系统,用于红外光的高对比度成像,峰值光敏度可达7.6 × 10 4 在 1342 nm 波长下 [15]。基于纳米光栅结构的柔性可拉伸光波导可制成具有柔性和可拉伸性的触觉传感装置,在可穿戴电子和机器人领域有着广泛的应用。李等人。制造了基于可弯曲硫属化物玻璃的柔性波导器件,并使用多神经轴理论来优化应变分布 [16]。此外,玻璃波导设计为蛇形,拉伸应变为 42%。除了新型柔性光学材料,许多最先进的制造技术已用于柔性和可拉伸波导制造 [17, 18]。 Samusjew 等。通过喷墨印刷制造了光聚合柔性和可拉伸光波导,该波导具有 120% 的拉伸性 [19]。为了实现基于纳米光栅结构的光波导器件的柔韧性和可拉伸性,需要具有光学透明性的新型软材料作为基石。如今,用于制造柔性和可拉伸光子传感设备的新材料不断开发[11, 20]。它们有几个共同的特性,包括透明度、柔韧性和可拉伸性。这些新型光学软材料可分为以下几类:弹性体、胶体晶体、水凝胶和合成蛋白石[21,22,23]。随着基于柔性光学材料和微/纳米制造技术的柔性可拉伸光波导器件的逐步发展,柔性可拉伸光波导在触觉感知、可穿戴电子产品和个人健康诊断方面的应用逐渐扩大。安德烈亚斯等人。使用聚苯乙烯聚合物作为覆盖层,氟化聚合物作为传输层,制备了超高拉伸性和弹塑性光波导传感装置,其拉伸强度可以超过300%[24]。亚历山大等人。使用全息技术和UV模板固化方法,在与二苯甲酮光敏分子混合的PDMS材料上制备柔性衍射光栅光[25]。尽管许多研究人员已经实现了柔性或可拉伸光波导,但柔性和可拉伸光波导的研究进展很少,尤其是在机器人触觉传感领域。
在本文中,设计和制造了一种新型的柔性和可拉伸光波导,采用纳米复制成型工艺。柔性可拉伸光波导是一种重要的触觉传感设备,可用于实现可穿戴和医疗保健应用的压力和应变传感。柔性和可拉伸波导是在硅主晶片上制造的,以 PDMS 为基底。纳米光栅母片用于在光波导上创建光栅结构作为输入/输出耦合器。在制造过程中对所有相关参数进行了分析和计算。所制备的柔性可拉伸光波导已应用于触觉传感领域的压力和应变测量。
方法
柔性可伸缩波导原理
对于柔性可伸缩光波导传感器,被导层的折射率为nwaveguide,波导的周围环境折射率系数为nexternal,满足以下关系:
$$n_{波导}> n_{外部}$$ (1)本文选用PDMS作为光波导层,其折射率系数为1.41,高于空气的折射率系数1.0,因此可以作为简单的光波导使用。触觉传感的实现需要基于触觉传感的柔性可伸缩光波导能够检测周围环境的不同物理参数(压力、应变等)。当柔性可拉伸光波导传感装置受到外部环境的影响时,其输出光功率强度与应力或应变引起的机械扰动有内在的联系。根据输出光强的变化,可以建立柔性和可拉伸光波导由外部环境力引起的变形。通过计算输出光强的变化,可以定量测量外界物理变化。
柔性可伸缩光波导传感装置示意图,如图1a所示。柔性可拉伸光波导部分包括: 1、柔性可拉伸光波导薄膜; 2、周期性纳米光栅深度; 3、光波导长度; 4纳米光栅周期; 5、纳米光栅宽度; 6、光栅耦合输入,7、光栅耦合输出。柔性可伸缩光波导的光栅耦合由部分6光栅耦合区和部分7光栅耦合区组成,用于输入和输出光强。光波导的传感是通过柔性可伸缩光波导与外部物理量(压力、应变等)进行的,得到输出光强与外部物理量变化的对应关系,如图1b所示。 .
<图片>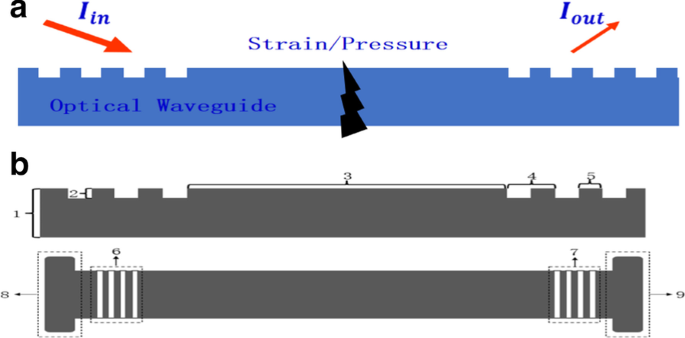
一 压力和应变传感原理,b 柔性可伸缩光波导示意图
当一束光波从光栅耦合器以一定角度耦合进入光波导时,它在光波导中传输距离L,然后通过输出光栅耦合器耦合出。假设输出光强度为I0。当外加压力F或应变S使柔性可拉伸光波导结构发生变形时,其对应的光波导输出光强变化为ΔI0,因此输出光强与压力的关系为:
$$\Delta I_{0} =f\left( F \right)$$ (2)光强变化与外加应变的关系为:
$$\Delta I_{0} =f\left( S \right)$$ (3)仿真结果与分析
柔性可拉伸光波导结构材料是一种具有柔韧性和可拉伸性的软质材料。柔性可伸缩光波导在进行触觉感知时,可能会因变形过程中产生的应力而导致器件损坏或无法正常工作。因此,在制造柔性可拉伸光波导器件时,需要对不同材料制备的光子晶体结构进行静态模拟,分析结构在受到外力作用产生拉伸变形时的内应力应变分布情况。 . ABAQUS软件用于有限元模拟。模型参数建立如下:光栅周期 850 nm,占空比 0.5,材料厚度 2 mm,光栅高度 200 微米,杨氏模量 1 MPa,泊松比 0.48,PDMS 密度设置为 0.98 g/cm 3 .载荷定义为施加在光波导两侧的拉伸位移,其他方向固定,即器件在水平方向拉伸10%。 PDMS光波导的应力-应变模态分布图如图2所示,从图2a可以看出,应变的形态变化主要分布在光栅层结构的下部,应变为两侧对称分布更均匀。应力集中主要出现在格栅与块状结构连接处,最大应力小于0.13 MPa,如图2b所示。力学仿真分析表明,基于PDMS的光栅结构波导具有很好的拉伸性能,仿真实验支持柔性可拉伸光波导结构应变传感功能的稳定性。
<图片>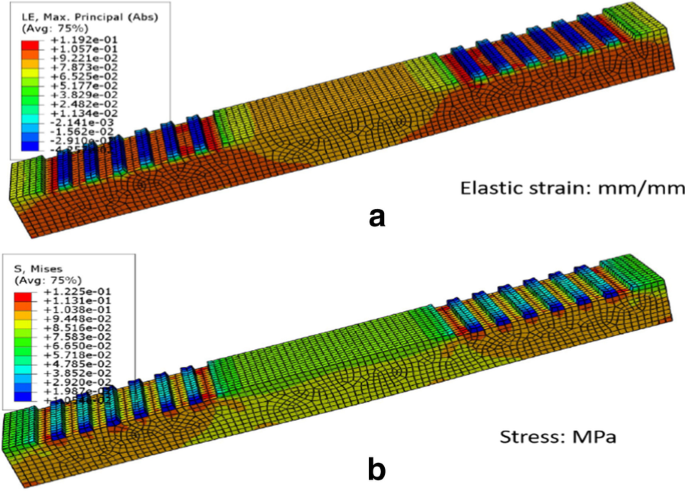
柔性可伸缩波导的有限元模拟:a 弹性应变; b 压力
柔性光波导触觉传感器的传感原理是光耦合进入光波导传输时,由于外界应力应变而产生光传输损耗,通过计算损耗达到应力应变传感的目的。因此,对于基于纳米光栅结构设计的光波导器件,需要进行电场模拟来验证光在光波导中的传输状态。在电磁仿真实验中,采用FDTD电磁仿真软件进行分析设计。由于设计的光波导为对称结构,因此选取两端的光栅耦合器作为研究对象。光栅的占空比为 0.5,光栅的周期为 ,光栅的高度为 。其基本结构如图 3a 所示。当高斯红光束以13.54度的入射角耦合到光波导中时,大部分白光束可以耦合到光波导中并沿光波导的水平方向传播。实验验证了当光束以一定的入射角进入光波导时,光束可以部分地在光波导中传播并耦合出去,如图3b所示。
<图片>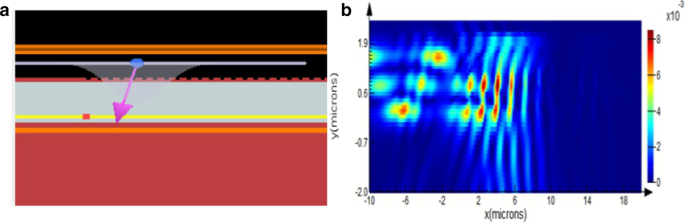
一 光耦合过程的仿真结构,b 入射耦合光的电磁分布
制作
柔性可伸缩光波导的输入输出方式为光栅耦合,采用硅母光栅模板通过纳米复制成型制造。可用于柔性和可拉伸光波导制造的柔性光学材料包括 PDMS、SU8、PMMA 和可弯曲硫属化物玻璃。柔性可伸缩波导的制作过程如下: (1) 母片模板。纳米光栅模板的光栅周期为 850 nm,填充因子为 0.5(LightSmyth Technologies, Inc.)。 (2)表面改性。将制备的硅晶片模板置于疏水性硅烷中并浸泡 15 分钟。然后用IPA清洗并用氮气干燥,以改变Si光栅模板的表面性质(由亲水变为疏水)。 (3)牺牲层。将聚乙烯醇(PVA)溶液(浓度10%)旋涂在4'’硅片上,然后在75 0 下干燥 C 30 分钟。 (4) 光栅波导模板。两个 855 nm Si 光栅放置在 PVA 牺牲层的顶部。确保两个光栅模板的方向相同且光栅面朝上,以及模板之间的相对距离。 (5) 涂覆未固化的 PDMS。将未固化的 PDMS 和固化剂以 10:1 的比例混合。然后,将未固化的 PDMS 搅拌均匀。之后,将混合物置于真空箱中并脱气 10 分钟。最后,将未固化的 PDMS 旋涂在光栅波导模板上。 (6) 剥离基于 PDMS 的波导。将在 PVA 上固化的光波导放入水中并浸泡 10 小时以溶解 PVA。从硅光栅模板上取出柔性可拉伸光波导和剥离波导,如图4所示,本文设计的柔性可拉伸光波导结构尺寸可调。在后续的应用中,研究人员可以根据自己的需求调整光波导的结构尺寸。柔性可伸缩光波导的调整主要可以从以下两个方面进行:(1)减小Si模板的尺寸; (2)减小光栅传输层的距离。通过以上两种方法,可以根据封装需要自适应设计和制造柔性可拉伸光波导的尺寸。
<图片>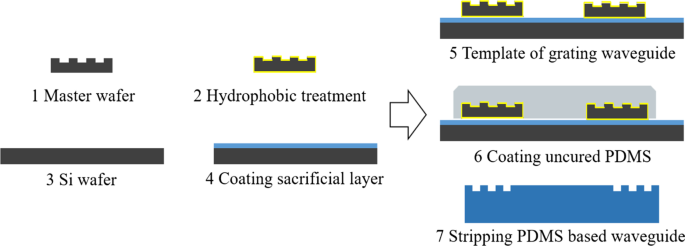
柔性可拉伸光波导传感器纳米复模成型工艺
纳米光栅结构是通过大规模复制和成型制成的。所选硅光栅模板的周期为 850 nm,占空比为 0.5,光栅高度为 200 nm,如图 5a 所示。纳米光栅形态的质量决定了输入和输出光的耦合效率。基于复制成型的纳米光栅的 AFM 图像如图 5b 所示。从图中可以看出,纳米光栅结构可以从硅光栅模板转移到PDMS基板上,具有良好的一致性。可以得出结论,所选择的纳米复制成型方法可以满足柔性和可拉伸光波导制造的要求。
<图片>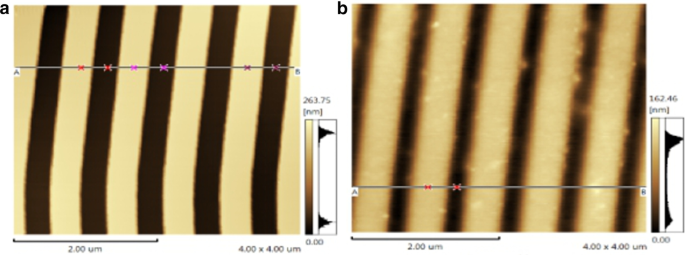
纳米光栅的 AFM 图像:a 硅纳米光栅模板,b PDMS上的纳米复制成型光栅
结果与讨论
感知平台
为了测量具有柔性和可拉伸波导的触觉传感的应力和应变,构建了柔性触觉传感平台。整个柔性可伸缩光波导实验平台如图6a所示,主要包括以下过程:(1)入射光源。选择波长为 632.8 nm 的激光点作为入射光。 (2)光源位置姿态调整装置。它是一种用于固定入射光源位置并实时调整其入射角的机械装置。 (3) 张力测量装置。由游标卡尺和非标固定件组成的拉力测量装置,可用于精确测量柔性可拉伸光波导的初始长度及实验中相应的拉伸长度变化。 (4) 光电探测器。光电探测器 PM100D(Thorlabs, Inc.)具有 500nW 至 500mW 的光强度检测范围。在该实验平台中,光电探测器用于检测基于柔性可拉伸PDMS的光波导上的输出光强变化,并根据输出光强的变化量计算相关压力和应变。该触觉传感实验平台成本低,兼容性好,可用于检测触觉压力和应变。应变精度可达0.1%,游标卡尺精度为0.02mm。同时,光电探测器用于检测输出光强的变化,光电二极管探头的分辨率为10 PW。纳米复制成型的柔性可拉伸光波导如图6所示,彩色方形区域为柔性可拉伸光波导的输入和输出部分,中间区域的透明区域为透光区。彩色效果是由光栅表面的光衍射产生的。柔性可拉伸光波导如图6b所示,彩色区域为柔性可拉伸光波导的输入和输出端口,中间透明区域为光波导的传输区域。光栅耦合输入输出端口的彩色图像是由光在光栅表面的衍射引起的。
<图片>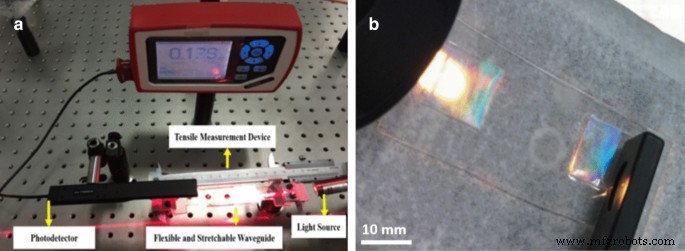
一 触觉传感平台,b 基于纳米光栅的柔性可拉伸光波导
触觉实验
在触觉感知中,压力和应变是机器人触觉传感器与外部环境交互时经常涉及的两个物理量。对压力和应变的实时准确感知可以使机器人精确捕捉与外部物体相互作用的机械变形程度,从而便于后续的优化反馈操作。
柔性可伸缩光波导的测试方法如下: (1)用稳定的光束通过耦合光栅以固定角度入射到柔性可伸缩光波导的波导传输层。在光波导器件的另一端,光电探测器用于收集来自输出光栅耦合器的输出光。 (2)当外力作用于柔性可伸缩光波导时,光波导的结构会发生变化,导致输出光强衰减。通过分析光强的衰减,可以准确地测量外力。 (3)当对柔性可伸缩光波导施加外部应变时,还可以根据输出光强的变化准确测量应变。对柔性可伸缩光波导进行了压力测试。在本实验中,柔性可伸缩光波导由游标卡尺的两个滑动头固定,并调谐 632.8 nm 激光源以最佳角度耦合到输入光栅端口。最佳角度的位置与光栅输出端功率计接收的最大功率有关。在柔性可伸缩光波导的中间区域,用压力计逐渐对其施加压力,并记录相应的压力值和光强数据。
实验结果如图 7a 所示。从图中可以看出,光波导的输出光强随着外加压力的增加而减小,压力变化与输出耦合光强呈线性相关。柔性可伸缩光波导的压力传感范围为0~25 × 10 –3 N.

柔性可伸缩光波导传感实验:a 压力与光强度损失响应图,b 应变与光强损失响应图
柔性可伸缩光波导的应变传感实验是通过带有标尺的伸缩机构进行的。首先,将柔性可伸缩波导预拉伸以避免因重力弯曲,使其处于水平状态,并通过游标卡尺记录其初始长度L0。然后,通过游标卡尺两端的夹紧机构对柔性可拉伸光波导进行拉伸,拉伸后的长度记为L,则相应的应变S可计算为:
$${\text{S}} =\frac{{L - L_{0} }}{{L_{0} }}$$ (4)基于柔性可拉伸光波导的应变传感实验结果如图所示。从图中可以看出,随着外加应变的增加,柔性可拉伸光波导的输出光强逐渐降低。此外,随着施加应变的增加,光功率降低,并且它们之间存在线性相关性。同时,柔性可拉伸光波导的应变传感范围为0~12.5%,应变精度为0.1%,如图7b所示。
传感系统可分为柔性可伸缩光波导和光检测器(即PM100D数字功率计)两部分。由于基于 PDMS 的光学传感器中传输的光的延迟非常低并且可以忽略不计,因此响应和恢复速度主要取决于光检测器。我们检测系统中功率计的响应率为 25 Hz。因此,柔性可拉伸光波导传感器的响应时间为 40 ms。通过加载和卸载施加的应变和压力来研究柔性和可拉伸光学传感器的循环稳定性。在施加一定载荷的情况下,我们通过重复实验计算拉伸次数。并且,结果表明它可以稳定地拉伸3000次以上。此外,如果将 PDMS 材料与 PAAm(聚丙烯酰胺)混合,该材料可承受超过 30,000 次负载循环 [26]。
如今,制造柔性和可拉伸的光学器件存在一些挑战。主要原因是可用于拉伸的透明柔性光学材料确实有限。另一个原因是需要开发新的制造技术,以实现基于柔性光学材料的微纳米结构的快速成型和制造。柔性可伸缩光波导为独创设计,以PDMS为波导核心层会增加波导损耗。最近,一些柔性光学材料被提出 [21, 27,28,29,30]。万等人。用纤维素纳米晶体和水性聚氨酯胶乳制造了一种柔性光子纸 [31]。未来可以利用这些相关的柔性光学材料改进光波导结构。
结论
总之,柔性和可拉伸波导适用于触觉传感、医疗保健和柔性电子领域的应用。利用硅光栅模板在柔性光学材料上制作柔性可拉伸光波导,纳米光栅结构可以通过纳米复制成型转移到柔性光学材料上。所制备的柔性可拉伸光波导具有成型快、成本低、易于制造等优点。研究了柔性可拉伸光波导的制备技术,结合牺牲层制备工艺、硅光栅模板制备、疏水处理和柔性材料制备技术,开发出最优制备工艺。柔性可伸缩光波导的应变检测范围为0~12.5%,外力检测范围为0~23 × 10 –3 N. 与传统的刚性光波导相比,基于柔性和可拉伸光波导的传感装置具有柔韧性、可拉伸性和易于适应曲面的特点。该器件使用的柔性光学材料为PDMS,可用于将柔性和可拉伸光波导的拉伸性能提高50%以上。该装置可以充分发挥柔性可拉伸光波导的可拉伸性和柔韧性,准确测量外部物理量(压力、应变等)变化引起的光波导输出光功率强度的变化。
数据和材料的可用性
所有数据完全可用,不受限制。
缩写
- IPA:
-
异丙醇
- 去离子水:
-
去离子水
- FDTD:
-
有限差分时域
- PDMS:
-
聚二甲基硅氧烷
纳米材料