

粗糙表面法向载荷下接触面积的演变:从原子尺度到宏观尺度
摘要
粗糙表面与法向载荷的接触面积的演变具有重要的基础和实际意义,从地震动力学到机器磨损。这项工作弥合了原子尺度和宏观尺度之间的正常接触行为的差距。由大量离散接触(簇)组成的真实接触面积被证明比表观表面积小得多。离散接触簇的分布和它们之间的相互作用是揭示接触固体机理的关键。为此,格林函数分子动力学(GFMD)被用于研究接触簇如何从原子尺度演化到宏观尺度以及簇之间的相互作用。发现簇之间的相互作用对其形成有很强的影响。接触簇的形成和分布远比粗糙模型预测的要复杂得多。忽视它们之间的相互作用会导致高估接触力。在实际接触中,由于凹凸不平之间的相互作用,接触簇更小且更离散。了解与法向载荷的接触面积的确切性质对于以下摩擦研究至关重要。
背景
大多数宏观表面被认为是粗糙和分形的 [1, 2]。粗糙表面之间的接触行为比完全光滑的表面复杂得多 [3, 4]。真正的接触面积是由大量离散接触区域(簇)构成的,它比表观表面积小得多。法向力和接触簇的大小、形状和分布是揭示接触行为的关键,这对于后续摩擦研究至关重要[5,6,7]。
为了获得接触面积和载荷之间的关系,自 1960 年代以来已经提出了许多模型 [1, 8,9,10,11,12,13,14]。其中,粗糙模型是最简单、最受欢迎的一种。在粗糙模型的早期应用之一中,格林伍德和威廉姆森 [8] 通过假设粗糙具有相同的半径但高度不同来描述接触界面的粗糙度。此后,粗糙模型盛行,该领域出现了大量文献。 Whitehouse 和 Archard [15] 通过考虑粗糙尖端的随机曲率半径开发了 Greenwood 和 Williamson (G-W) 模型。 Nayak [16,17,18] 将随机过程理论 [19, 20] 的技术引入到高斯粗糙度的分析中,随后被 Bush 等人使用。 [9] 粗糙表面接触。
粗糙模型中的基本假设之一是可以忽略粗糙之间的相互作用,这表明潜在的接触粗糙可以由表面几何形状预先确定。然而,这种假设可能会导致对接触力和接触面积的估计不准确。为了获得接触簇的演化和它们之间的相互作用,我们利用格林函数分子动力学(GFMD)[21,22,23]研究分形粗糙表面。
这项工作是为了弥合正常接触行为的原子尺度和宏观尺度之间的差距。通过考虑粗糙相互作用的数值例子证明了接触面积从原子尺度到宏观尺度的演变。在随后的讨论中,我们首先简要介绍我们的分形表面生成方法、GFMD 模型、接触簇检测算法和数值实验设计。然后我们关注接触集群的形成和发展以及这些过程对界面行为的影响。
方法
粗糙分形表面生成
为了研究粗糙表面的接触行为,我们需要为数值模型生成表面。几种算法已用于分形表面 [24]。在这项工作中,我们使用傅立叶变换方法生成分形粗糙表面,如图 1 所示。需要四个参数来确定分形粗糙表面几何形状。这些是最大频率 (w H ),最小频率 (w L ), Hurst 指数 (H ),以及幅度的标准偏差 (P )。曲面的基本统计参数,如 RMS(均方根)高度 \( \left(\sqrt{M_0}\right) \)、RMS 斜率 \( \left(\sqrt{M_2}\right) \) ,以及RMS 曲率 \( \left(\sqrt{M_4}\right) \),是界面行为的关键参数,其中 M 我 是 i 表面光谱的 th 径向矩 [19, 20]。值得注意的是,表面统计参数M 我 与剖面统计参数m有关 我 由以下等式:\( {M}_0={m}_0,{M}_2=2{m}_2,{M}_4=\frac{4}{3}{m}_4 \)。众所周知,凹凸密度n (表面峰顶或谷底)可以通过以下公式确定:
$$ n=\frac{1}{6\pi \sqrt{3}}\left({m}_4/{m}_2\right) $$ (1)
不同尺度的GFMD模型,从原子尺度到宏观尺度(在σ )
此外,地表总峰谷数N 表示为
$$ N={A}_0\times n={A}_0\frac{1}{6\pi \sqrt{3}}\left({m}_4/{m}_2\right) $$ (2 )其中 A 0 是表观表面积。对于自仿射分形表面,表面统计参数与输入参数(w , H , P ) 由以下等式:
$$ {m}_i={\int}_{w_L}^{w_H}{\omega}^i{\varPhi}_{\phi}\left(\omega \right) d\omega ={\int} _{w_L}^{w_H}{\omega}^iB{\omega}^{-\left(1+2H\right)} d\omega $$ (3)其中 B 是表面粗糙度常数,与P有关 .方程 (3) 和 (2) 表明分形表面峰顶/谷数取决于波长和赫斯特指数。分形表面统计特性的详细讨论可以在文献[25, 26]中找到。
在傅里叶变换算法中,作为一个典型的例子,我们设置Hurst分量为H =0.5,最大频率为w L =1/(24σ ),最小频率为 w H =1/(256σ ),频率幅度的标准偏差为P =0.69,系统大小为512 × 512个原子(初始间距为1.12σ )。这些输入参数随后生成具有以下统计参数的表面:表面 RMS 斜率 \( \sqrt{M_2}=0.077 \) 和 RMS 曲率 \( \sqrt{M_4}=0.0077 \) . 根据方程,地表峰顶/谷的总数为 150。 (2)从数值上看,表面峰顶数为158个,谷底数为159个,误差在5%以内,表明系统规模在统计意义上是可以接受的。事实上,当我们将系统尺寸增加到 2048 × 2048 个原子(初始间距等于 1.12σ ),统计参数的结果与较小系统的结果一致。
GFMD 模型
粒子间相互作用很难通过实验来捕捉 [6, 27]。最近,分子动力学已被用于模拟粒子间相互作用,旨在研究接触/摩擦机制的分子起源。然而,大规模分子动力学模拟的计算费用相当高。因此,GFMD 因其高效率而被引入来模拟表面。 GFMD 使用分子动力学来模拟界面原子(此处为两层)的相互作用,而通常表现出弹性行为的非界面层则由格林函数模拟。因此,它将大原子系统减少到界面处的两层原子(如图 1 所示),这大大降低了计算成本。 GFMD 的详细讨论可以在文献 [21,22,23,28] 中看到。在 GFMD 模型中,Lennard-Jones (LJ) 势用于模拟粒子间相互作用。方程写为
$$ u(r)=4\varepsilon \left[{\left(\frac{\sigma}{r}\right)}^{12}-{\left(\frac{\sigma}{r}\right) )}^6\right] $$ (4)其中 ε 是势阱的深度,σ 是粒子间电位为零的有限距离,r 是粒子之间的距离。我们取ε , σ , 和 ε /σ 分别为能量单位、距离单位和力单位。根据 LJ 势,我们知道当 r =2 1/6 σ ≈ 1.12σ ,粒子间力为零。当 r> 1.12σ ,粒子间力是吸引力;当 r <1.12σ ,粒子间力是排斥力。由于我们在这项工作中不考虑粘附,截止距离设置为 1.12σ .用于原子层的晶体结构是面心立方 (FCC)。由于对称性,我们只取界面层形成如图1所示的表面几何形状,平面下方的弹性块用格林函数模拟。
联系集群识别方法
在界面中观察到三个尺度,如图 1 所示:(1)原子尺度,由 LJ 势模拟; (2)凹凸尺度,即接触原子的群效应; (3)宏观尺度,即接触簇的群体效应。接触簇的大小、形状、位置和分布是分子行为和界面特性之间的关键桥梁。在纳米尺度上,原子接触区域很难定义 [6]。我们在这里通过法向分力 fz> 0 来定义一个接触原子。随后,连接的接触原子被定义为一个接触簇。标记技术 [29, 30] 用于搜索联系集群。在这里,我们使用改进的加速算法,避免了递归搜索过程。算法流程图如图2所示,其中原子力数据是从格林函数分子动力学模拟中提取的。算法分为以下8个关键步骤。
<图片>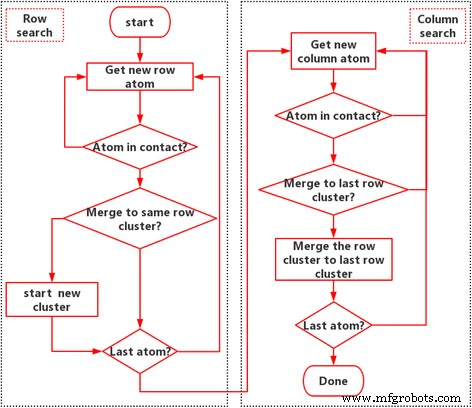
接触聚类检测算法:标记技术
Step 1. 开始行搜索,获取新的原子数据,即逐行搜索原子。
步骤 2. 确定原子是否接触。如果未接触,则返回步骤1。如果接触,则进行下一步。
步骤 3. 将当前原子与同一行中的前一个原子进行比较。如果前一个原子也有接触,则将该原子合并到前一个原子所属的簇中,然后用与前一个原子相同的编号标记该原子。如果前一个原子没有接触,则用前一个数字加一的新数字标记该原子。
第四步,判断是否是最后一个原子;如果不是,请返回步骤 1,或转到列搜索过程。
Step 5. 开始列搜索,获取新的原子数据,即逐列搜索原子。
步骤 6. 确定原子是否接触。如果未接触,则返回步骤5。如果接触,则进行下一步。
步骤 7. 将当前原子与同一列中的前一个原子进行比较。如果前一个原子也有联系并且属于不同的簇,则将当前簇合并到前一个原子所属的簇中,然后用相同的编号标记原子并存储它们。如果前一个原子没有联系或属于同一个簇,则进行下一步。
Step 8. 判断当前原子是否为最后一个原子;如果不是,则返回步骤5,否则搜索过程完成。
数值实验设计
众所周知,通过引入等效弹性模量E*,两粗糙面接触问题可以简化为一个复合刚性粗糙面和一个平坦弹性面的问题 , 写成
$$ \frac{1}{E^{\ast }}=\frac{1-{v}_1^2}{E_1}+\frac{1-{v}_2^2}{E_2} $$ ( 5)其中 E 1 和 E 2分别为上表面和下表面的弹性模量。为简单起见,我们考虑与弹性光滑表面接触的刚性粗糙表面,然后研究接触簇的形成和发展及其力区行为。在下面的讨论中,我们将使用上面生成的表面(上表面是刚性和粗糙的(E 1 =∞),下表面光滑有弹性(E 2 =3ε /σ 3 )) 研究接触行为,其中 v 1 和 v 2 设为 0.5。我们的系统大小是 512 × 512 个原子(初始间距等于 1.12σ ),并且在 x 中使用周期性边界条件 -y 飞机。弹性块深度设置为1024个原子层(初始间距等于1.12σ )。在常规的分子动力学模拟中,该系统将由 268,697,600 个原子组成; GFMD 模型将数量减少到 524,288(两层原子),如图 1 所示。我们逐渐将粗糙表面(在顶部)推入平坦的弹性表面。刚性表面的载荷由位移控制。每个位移加载步长设置为 0.01σ , GFMD 算法会更新每个原子的位置,直到原子力满足收敛条件L 1 -范数 =0.01ε/σ。 最大迭代次数设置为50,000,以避免死循环。
结果与讨论
联系集群分布与发展
凹凸模型将凹凸视为球形或椭圆形,并且不考虑接触凹凸之间的相互作用。在这项工作中,粗糙模型中使用的粗糙是从上面生成的表面中提取的。在凹凸模型中,潜在的接触凹凸可以根据它们的高度预先由表面几何形状确定;也就是说,表面峰顶/谷底将根据它们的高度形成接触簇。但实际上,凹凸不平的形状是不规则的,通常几个相邻的凹凸可能合并成一个大的,如图2所示。观察到一开始有六个独立的凹凸,作为接触力增加,它们最终合并成一个大的接触簇(图 3)。这表明,假设粗糙之间的距离足以使粗糙不相互影响,可能会导致结果不准确。
<图片>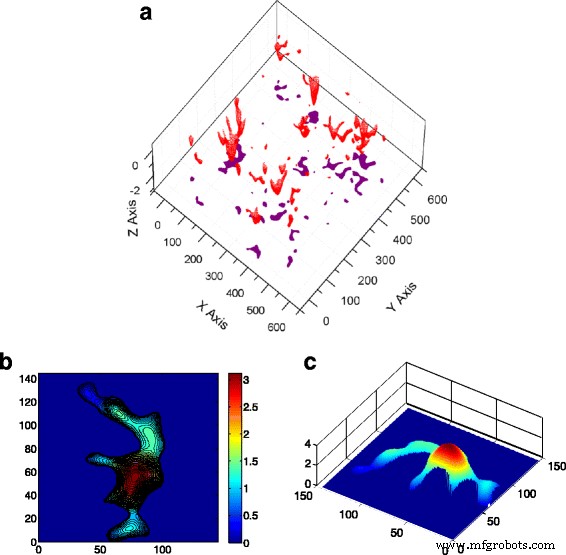
簇的形状和合并效果。 一 接触簇的 3D 视图及其在 x 上的投影 -y 平面(在σ )。 b 一个典型的接触簇由六个独立的凹凸不平组成。 c 接触簇几何的 3D 视图(在 σ )
图 4 表明,簇数随着接触面积的增加先增加然后减少,而表面粗糙度总是随着接触面积的增加而增加。这是由于图 3 中解释的合并效应所致。
<图片>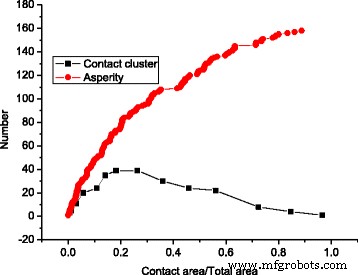
不同接触面积下的表面谷和簇数
在粗糙模型和 GFMD 模型中都观察到了接触簇合并效应。然而,在接触面积相同的情况下,GFMD 模型中的接触簇数远大于粗糙模型的接触簇数,如图 5 所示。观察到 GFMD 模型中的接触簇数几乎是其两倍在粗糙模型中,如图 5 所示。造成这种情况的主要原因是粗糙模型没有考虑粗糙间的相互作用。然而,在 GFMD 模型中,接触簇是相互影响的。接触簇产生的位移场在整个表面区域是连续的。大簇群的位移导致弹性表面上出现新的几何形状,这会影响新接触簇的形成。因此,接触簇的形成不仅取决于刚性粗糙表面的高度,而且还受到光滑弹性表面变形的影响。这也可以在图 6 中观察到,该图分别显示了粗糙模型和 GFMD 模型在不同区域的接触簇分布。如图 6 所示,在接触面积为 5% 时,粗糙模型和 GFMD 模型的接触簇数分别为 17 和 34,而在接触面积为 10% 时,它们的接触簇数变为 24 和 52 , 分别。这表明 GFMD 模型中的接触簇比粗糙模型中的更离散。在 GFMD 模型中,平均簇大小较小,但大多数簇将与山峰/山谷重合,如图 7 所示。此外,粗糙模型将山谷或山峰视为潜在的粗糙(取决于哪一侧接触)。然而,在图 8 中,我们发现随着接触面积的增加,峰顶和谷底都可以接触。在图 8 中,当接触面积较小时,接触的大部分凹凸是表面谷。然而,当接触面积大于表面积的10%时,越来越多的山峰也可以形成接触簇。
<图片>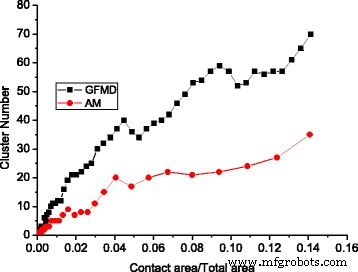
不同模型的集群开发
<图片>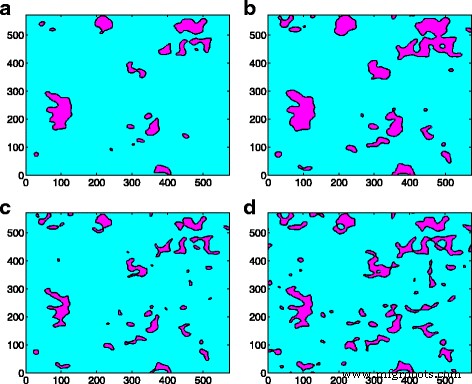
聚类分布等值线(在σ ) 分别在粗糙模型和 GFMD 模型的不同接触区域。 一 具有 5% 接触面积的粗糙模型。 b 具有 10% 接触面积的粗糙模型。 c GFMD 模型,接触面积为 5%。 d 10%接触面积的GFMD模型
<图片>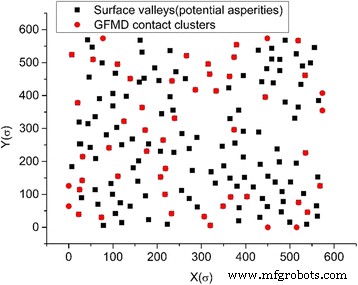
10%接触面积下接触簇和表面谷的位置
<图片>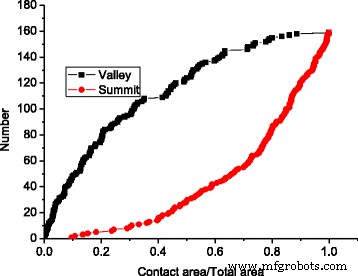
不同地区地表谷地和峰顶数量增长
接触区域-负载关系
法向载荷下的力-面积关系对接触行为至关重要。在早期的模型中,凹凸不平通常被认为是球形和椭圆形。然而,真正的接触集群要复杂得多。在本节中,我们比较了三种模型的接触力-面积关系:(1)GFMD 模型; (2) 凹凸模型(标记为AM),在我们使用GFMD将这些凹凸推入平坦的弹性表面之前,直接从表面提取凹凸(这确保在接触过程中不会出现意外的接触簇形成); (3) Greenwood and Williamson 模型(标记为 G-W),其中将粗糙度转换为等效球体。球体半径为
$$ \frac{1}{R}=\frac{8}{3}{\left(\frac{m_4}{\pi}\right)}^{1/2} $$ (6)对于 GFMD 模型和从表面精确提取粗糙的粗糙模型,可以通过对从 GFMD 提取的每个接触簇的力求和来获得界面中的总力。对于格林伍德和威廉姆森模型,我们对每个粗糙力使用赫兹理论(与 GFMD 模型中使用的材料属性相同),这意味着总力 F 可以表示为
$$ F=\sum \limits_{i=1}^n{f}_i=\sum \limits_{i=1}^{\mathrm{N}}\frac{4}{3}{E}^{ \ast}{R}^{1/2}{\left(d-{z}_i\right)}^{3/2} $$ (7)其中 Z 我 是凹凸高度,d 是施加在刚性表面上的位移,f 是基于赫兹接触理论的凹凸接触力。
在图 9 中,我们比较了三个模型的力-面积关系,它们表现出线性关系。观察到 GFMD 中的总力比粗糙模型和 G-W 模型小得多。 F 是 GFMD 预测的 1.80 倍,F 在 G-W 模型中是 GFMD 预测的 1.54 倍。这可以通过接触簇的 RMS 斜率来解释。已知法向载荷与RMS斜率成正比,即\( L\propto \sqrt{M_2} \)。在 GFMD 模型中,接触区域由更多的簇组成,它们的渗透比粗糙模型的要浅。由于粗糙尖端的斜率较小,GFMD 模型中接触簇的 RMS 斜率也较小。图 10 显示了三个模型的接触集群的 RMS 斜率。可以看出GFMD中接触簇的RMS斜率小于0.077的表面RMS斜率,而其他两种模型的接触簇RMS斜率均大于表面RMS斜率。
<图片>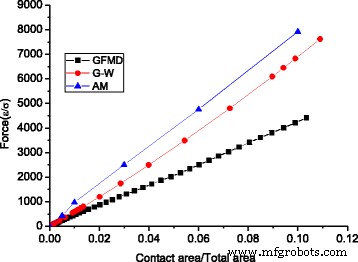
不同机型接触面积与载荷的关系
<图片>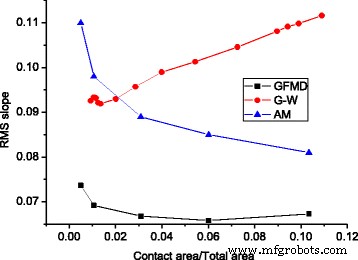
不同模型不同接触面积的接触簇RMS斜率,其中表面RMS斜率为0.077
结论
为了找到接触面积从原子尺度到宏观尺度的演变,使用GFMD模型研究了粗糙分形表面接触问题。我们通过大于零的力的存在来定义原子接触,并在同一系统中研究了三种不同的长度尺度。发现凹凸不平间的相互作用对于接触簇的形成是必不可少的。一些星团足够接近,可以合并成一个大星团。由于弹性光滑表面的弹性变形,实际接触区域远比表面几何预测的复杂得多。大多数接触簇位置与地表顶峰/谷底重合。然而,该星团的规模较小,其形成不受表面凹凸高度的影响。随着接触面积的增加,峰顶和谷底都可以形成接触簇。在 GFMD 模型中,力比粗糙模型小得多,而 GFMD 模型中的接触簇数要大得多。 GFMD 模型中接触簇的 RMS 斜率小于粗糙模型的斜率,这解释了为什么粗糙模型会导致更高的压力。我们的研究结果表明,不能简单地通过表面几何形状来预测真正的接触面积。与法向载荷的实际接触面积对后续摩擦研究具有重要意义。
纳米材料
- 惠普 3D 打印技术的演变:从聚合物到金属 AM
- 从 M2M 到 Iot 到 IoE 的演变背后的故事
- 为新常态重新思考智能制造
- 具有可控厚度的二硫化钼用于电催化析氢
- 一种由亚克力-金纳米复合材料制成的高灵敏度电化学 DNA 生物传感器,用于确定龙鱼的性别
- 用聚苯乙烯-共-丙烯酸复合纳米球检测霍乱弧菌 DNA 的超灵敏生物传感器
- 基于三苯基膦的功能性多孔聚合物作为一种高效的多相催化剂,用于从 CO2 合成环状碳酸酯
- 具有非对称接触形式的多层 MoTe2 光电晶体管的显着光伏响应
- 控制合成不同形态的 BaYF5:Er3+、Yb3+ 以增强上转换发光
- 从 CM 到 EMS 再到 MSP:一个行业的演变
- 面向新常态的面向未来的供应链
- 压榨葡萄酿酒的演变