工业4.0先进制造技术信息网站!

为什么选择 sPiRobot? 如果您关注我的博客,我总是使用 Arduino Board 来制作我的项目,但为此我使用 Raspberry Pi 作为我机器人的大脑。这就是我称其为“PiRobot”的原因。 材料? 1x Raspberry Pi1x 网络摄像头1x USB wifi Dongle1x 4Gb 存储卡(Raspberry Pi)1x 微型 USB 电缆为 Pi 供电(Raspberry Pi)1x 9v电池1x H-Bridge / L293d 电机驱动器1x HDMI / AV 视频监视器(树莓派)1x 键盘鼠标(树莓派) 设置你的树莓派: 首先,我们将设
当你懒得自己读一本书时,有人给你大声读一本书不是很好吗? 你有没有想过把 Kindle Book 转换成另一种格式,或者只是复制文本?您有没有想过从 Kindle 中删除所有精彩片段或笔记? 在这个项目中,我们用制作了一个电子书阅读机器人 砖块。 我们使用 BrickPi 控制 LEGO Mindstorms 进行翻页,使用 RaspberryPi 摄像头为每一页拍照,使用 Raspberry Pi 将文本转换为语音。结果是一个电子书阅读器,可以存储文本、搜索所选文本或为您朗读电子书。 第 1 步:所需零件: RaspberryPi(最好是 B 型) 砖块 树莓派相机 BrickP
大家好,当我看到树莓派比赛时,我决定制作一个我有过一段时间的想法的原型,让我展示我的 Raspoulette!我将尝试解释如何制作一个惊人的 Raspoulette !Raspoulette 是一种基于树莓派的自主太阳能关闭系统鸡舍门。这意味着 Raspoulette 在阳光到来时打开鸡舍的门,并在阳光消失时关上门。为了节省能源,我将解释如何制作黄昏开关。但首先,您需要为这个项目提供什么: 太阳能断路器:-1 继电器 12v dc-1 LDR-1 电位器 1M-4 电阻 r1=180k r2=10k r3=100 r4=4.7k-3 晶体管 npn (bc547 like)-1 二极管 稳
MonkMakes 的最新产品是我使用 RaspiRobot Board v2 (RRB2) 设计的机器人套件。该套件可从 MonkMakes 获得。 概览 该套件包括:* 一个机器人底盘,包括两个齿轮电机和一个 6 x AA 电池座。* 一个插入 Raspberry Pi 并控制电机的 RaspiRobot Board v2 (RRB2),以及为 Raspberry Pi 本身供电。它使用开关模式电源,可为 Pi 提供高达 2A 的电流。大量用于 WiFi 加密狗、显示器以及您可能想要连接到 Raspberry Pi 的几乎任何其他东西。* HC-SR-04 超声波测距仪结构 构建
Project MrRobot 是一个支持 Ubuntu 移动应用程序的 Robotics,它具有语音、触摸和摇动控制功能,可与 Rapiro 机器人进行交互。该项目由我们的 E-minors 团队在 Ubuntu 深圳 Hackathon 中在 28 小时内完成。所有代码都是开源的,基于 arduino 的 Rapiro 机器人也开源了他们的代码和 3d 结构,这意味着您可以 3d 打印零件并自己构建一个!!! 我们的指导员带领您完成整个过程: 如何将代码从 Ubuntu Sdk 部署到移动设备 了解如何与 wit.ai 语音和文本可识别智能 API 集成,以构建语音控制的 ubunt
在纽约市的 Maker Faire 上,ValentFX 展示了两个与 BeagleBone 和 Raspberry Pi SBC 堆叠的开源 FPGA 板,还推出了 BBot,这是一款基于 BeagleBone 的饮料服务机器人,使用早期的 FPGA 板版本构建。 FPGA 附加板使用 Xilinx Spartan 6 LX9 FPGA,提供 Arduino 和 PMOD 扩展,并支持两个 ARM SBC 的开源 Linux 代码。在去年纽约的 Maker Faire 上, ValentFX 推出了其第一款 Logi 板,即当时的 alpha 阶段 Logi-Mark1,它具有 Arduin
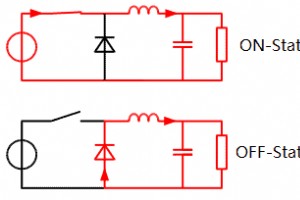
Raspberry Pi 是用于机器人项目的绝佳平台,但它有一个严重的限制:默认情况下它没有内置电源按钮。作为基于 Linux 的系统,Raspberry Pi 需要在关闭电源之前正常关闭。简单地拔掉电源线可能会损坏 SD 卡上的文件系统,这种情况我已经经历过太多次了。为了避免损坏文件系统,我们构建了一个简单的电路来优雅地关闭电源。该电路还允许我们将机器人置于睡眠模式,在指定的时间间隔后自动唤醒机器人。出于好奇,我们增加了测量电流消耗的可能性。确实存在一些具有类似功能的商业解决方案,例如 Sleepy Pi,但这种系统很容易从单独的组件构建。 感到困倦? 自从我开始构建我们的机器人以来,
摘要: 本报告的目的是讨论和演示设计和实现能够使用 USB 网络摄像头视觉检测和避开障碍物的移动机器人的概念。该系统被移植到 Raspberry Pi 硬件,这是一台基于 Linux 的 35 美元计算机。本博客将重点介绍成功实现能够在室内环境中导航的移动机器人所需的重要概念。所提议的解决方案旨在在仓库环境中使用,无需人工操作即可将货物从一个位置运输到另一个位置。 简介: 市场上已经存在机器人,但这些机器人的购买价格昂贵,并且专门设计用于在仓库、战场或家庭等单一环境中工作。这些机器人能够使用被动传感器(例如超声波传感器和红外传感器)检测障碍物,并且由于其在地面上的移动性,有时也被
请注意:此说明并不完整 - 但可能会有所帮助 发布,让德里神经中心的优秀人才把代码带到学校 我希望回到这个问题上,但我目前的工作让我暂时不能这样做。 这个教科书是我在此处找到的另一个躲墙机器人的替代品: http://www.instructables.com/id/Arduino-wall-avoid... 目的是提供替代平台和编码以实现相同的结果。 对于这个项目,我们使用 Raspberry Pi 和熟悉的 L293D 双 h 桥芯片。超声波传感器是广泛使用的HC-SR04。 编码是用 Python 完成的,我发现对于那些没有做过大量编码的人来说,它更容易理解。 享受这个项
Bridge Shield 是面向学生、黑客和研究人员的董事会。您可以将它与 Pi 或 Arduino Uno 一起使用,轻松创建酷炫的 DIY 项目。这将是一个开源板,我们目前正在设计第二代。 我们目前在 Kickstarter 上,您可以通过支持我们或与您的朋友和家人分享以下提及链接来支持我们 Bridge Shield Kickstarter 链接 它有什么? 10自由度惯性测量单元。 温度感应器。双桥电机驱动器,可驱动高达1Amp的电机。 8通道伺服电机驱动器,支持I2C。 具有纽扣电池备份功能的 RTC。 打开5V-3.3V双向电压电平转换器。 Arduino
这不是关于 Pi 和 Arduino 编排的权威故事。只是我的版本。 第一步:Berryboot 1. 获取 Berryboot。 Berryboot 将允许您下载多个 Raspberry Pi 映像。 第 2 步:SD 卡准备 现在将 zip 文件解压缩到空白 SD 卡中。 第 3 步:Berryboot 将 BerryBoot SD 卡放入您的 Pi 中并启动它。 2. 使用 Raspbian Wheezy 设置 RPi(第一个选项)。 第 4 步:WiFi 加密狗 3. 设置您的 WiFi 加密狗。我相信 BerryBoot 现在将在初始启动时设置您的 WiFi 加密狗,它为我
捕获真实数据 (RPi/DHT22),将它们保存在数据库 (SQLite) 中,创建图形 (Matplotlib) 并将它们呈现在网页上 (Flask)。 简介:从数据到图形。 Flask 和 SQLite 的网络之旅 在我之前的教程 Python WebServer With Flask 和 Raspberry Pi 中,我们学习了如何通过使用 Flask 构建的 Web 前端页面与物理世界进行交互。因此,下一个自然步骤是从现实世界中收集数据,并在网页上提供给我们。很简单的!但是,例如,如果我们想知道前一天的情况会发生什么?或者对这些数据进行某种分析?在这些情况下,我们必须将数据也存储
本文介绍了基于树莓派的水下无人机样机的设计过程、开发和组装操作。 我在探索频道上看过很多关于发明家的节目,有一次我决定自己做一些有趣的事情,这样它就可以一次非常令人印象深刻和困难:一些电动机、控制器、操纵、相机。买了很多有用(而且不是很有用)的东西后,我开始考虑我应该开始什么样的项目。最后我得出的结论是,有很多飞行和驾驶无人机,但不是关于水下无人机(哈哈,但据我所知,我当时大错特错)。 在网上冲浪后,我发现了几个有趣的项目,但大多数都处于开发阶段,或者价格不菲(3k++美元)。对这个项目感兴趣的人可以在这里找到一些。 展望未来,我可以说我已经有了一个可以游泳几米深的工作原型,尽管它有
在您的 Raspberry Pi 3 上设置一个可用的网络服务器,并将其永久连接到 Onion,托管您自己的免费 .onion 网站。 可以在以下位置找到该项目的工作版本: https://t0r.ch:100(表面网络)或 https://darktorch5lgddvm.onion .onion 域 有更多关于surface web和.onion的信息,如果你不知道它是什么,值得一读。这篇文章很不错,但还有很多其他文章解释了表面网络、深层网络和暗网/暗网之间的区别。 要访问 .onion 站点,您可以在此处获取 Tor 浏览器包:https://www.torproject.or
该项目将带您完成启动 RAK831 LoRa 网关模块并使用 WiFi 作为回程运行所需的所有步骤。 简介 本分步指南面向希望使用 RAK Wireless 出色的 RAK831 Lora 无线电前端模块开发自己的 Lora 网关的开发人员。本指南假定您了解 Raspberry pi 生态系统、硬件和相关 Debian 操作系统的基本知识。该指南还假定您了解 Raspberry Pi 上的 GPIO 和外围设备的基本知识。那么让我们开始吧。 什么是 LoRA? 洛拉 联盟™ 技术。 LoRaWAN™ 是一种低功耗广域网 (LPWAN) 规范,旨在用于区域、国家或全球网络中的无线电池供电设
如何使用 Raspberry Pi 4 作为网络服务器。除此之外,我们还将看到如何使用 CSS 以 HTML 和样式制作网页 故事 在本教程中,我们将学习如何使用 Raspberry Pi 4 作为 Web 服务器。除此之外,我们还将看到如何使用 CSS 以 HTML 和样式制作网页。那么让我们开始吧。 需要的组件: 树莓派 4, 双风扇散热器铝制装甲外壳。 (可选) 安装 Apache: Apache 是 Web 服务器应用程序,它通过 HTTP 提供 HTML 文件。 首先,更新可用的包。打开终端并输入命令 sudo apt update 输入这个命令安装apache2 s
这是一个电子墨水仪表板,可提供使用 Raspberry Pi Zero 从 API 中提取的实时信息。 我一直对从选定来源为您提供实时信息的项目感兴趣,看到人们在做智能镜像项目让我想为自己做一个,我最终做这个项目的最大原因之一是帮助我的早上生活中的伴侣,她使用公共交通去上班,这个仪表板会为她提供到我们最近站点的公交车的信息,以及当前的天气情况。 由于功耗低,我选择使用电子纸显示器而不是 LCD,我见过很多项目为您提供天气、日历或使用普通树莓派的任务列表等内容,我想要一些可以挂在墙上,也可以隐藏在框架内,树莓派零 w 是一个不错的选择。 我从我的工作中获得了一些 Python 知识,但仍
在 C++17 中构建和运行并行代码,使用 Khronos CL/SYCL 模型规范在 Raspberry Pi 物联网板上实现。 我们的目标…… 该项目提供了有用的指南、技巧和教程,用于在 C++17/2×0 中构建现代并行代码,使用 CL/SYCL 编程模型实现,并在下一代 Raspberry Pi 4B IoT 板上运行,基于创新的 ARM Cortex-A72、四核、64 位 RISC-V CPU。 读者将了解如何设置开箱即用的 Raspberry 4B IoT 板,并将其用于并行计算,使用 Khronos CL/triSYCL 和 Aksel Alpay 提供 C++17 中的
预先选择要启动的操作系统,甚至在通过切换开关打开计算机之前。现在您不必等待选择操作系统。 故事 在 Hackaday.io 的项目中徘徊,我偶然发现了 Stephen Holdaway 的这个项目(点击)。在这个项目中,他解决了每一个双启动用户面临的一个令人沮丧的任务,当我们想切换到windows时,他总是坐着等待从GRUB菜单中选择os(Windows)。他能够添加一个硬件开关来确定每次打开计算机时要启动的操作系统。 他通过将 STM32 微控制器配置为 USB 大容量存储设备来实现这一点。他在 hackaday 帖子(点击)中记录了他整个项目研究和实施的过程。请阅读他的帖子以更好地了
8 GB RAM 32 GB eMMC Raspberry Pi CM 开发板,带触摸屏和大量接口。 故事 我发表的最后几篇文章是关于 TinyML 和 Wio 终端——基于 Cortex M4F 的开发板,在坚固的塑料外壳中带有 LCD 屏幕。 Seeed 工作室,该公司让 Wio Terminal 决定更进一步,并在最近发布了 reTerminal - 基于 Raspberry Pi 4 计算模块的开发板,在坚固的塑料外壳中带有 LCD 屏幕。 我拿到了其中一个 reTerminals 并制作了一个简短的拆箱视频,其中还包括一些演示和对该设备可能用例的解释。本文作为视频的补充,扩展
制造工艺