工业4.0先进制造技术信息网站!

Motoman UP20 是一个复杂的机器人系统,在世界各地的许多工厂中都有使用。 UP-20 由多个轴组成,这些轴被命名为(从底座开始)S、L、U、R、B 和 T 轴。但是,如果没有某些关键部件,这些金属件将无处可去。还有手腕总成、同步带、各轴减速机、内部接线、伺服电机。 手腕组件(部件号 HW9170593)是连接任何机器人的臂端工具的地方。这就是 EOAT 获得其机动性的地方,重要的是要安装 HW-917-0593 以使机器人正确执行其应用。 R、T 和 B 的同步带,零件号分别为 60S4.5M414、60S4.5M518 和 60S4.5M729(分别),对于机器人的交互工作至关

与 Motoman SV3X 一样,Motoman SV3XL 是一款不仅能够焊接或材料搬运,而且两者兼具的机器人。然而,Motoman SV3XL 是机器人的长距离型号,这意味着它的内部工作原理与其姐妹 SV-3X 不同。但是,和她的姊妹机器人一样,SV3XL 仍然由电机、减速器和内部布线组成的系统运行。 SV3-XL 上的交流伺服电机,部件号为 HW9381586-A、HW9381587-A 和 HW9381589-A,可在机器人的 S、L、U、R、B 和 T 轴上找到。这些伺服电机配备放大器,可以发送和接收来自机器人其他部分的反馈,从而使电机进行相应调整,从而使机器人能够以更高效的方式

每隔一段时间,技术就会加速变化的速度。就 Motoman 示教器而言,那个凸起就是 DX100。 与之前的产品不同,DX100 示教器最多可控制 8 个机器人(72 个轴)。这是该系列早期型号的两倍,允许制造商通过购买更少的设备来完成相同的任务来节省资金。 这种节能示教器的处理速度比早期型号更快,先进的机械臂控制可实现更平稳的运动和更快的 I/O 响应。在保留 Windows CE 操作系统的同时,Motoman DX-100 配备了全新的彩色触摸屏。它还吹捧了多窗口显示功能和独特的导航光标,通过减少 30% 的培训,进一步提高了易用性。 有了DX 100示教器,操作者也有了以前没有的自

虽然在此之前已经出现了示教器,但来自机器人技术领导者 Fanuc 的 RJ3 示教器是该公司在示教器技术方面取得重大进展的一系列产品中的第一个。 Fanuc RJ3 示教器,部件号 A05B-2301-C305,是首批符合人体工程学设计的示教器之一,这意味着它的设计适合工人并防止受伤。过去,示教器较重且照明较少。 RJ-3 示教器重量轻,可避免手和手臂劳损,它有一个更大的背光屏幕,可防止眼睛疲劳。 然而,符合人体工程学的设计并不是 A05B2301C305 RJ 3 示教器的唯一吸引力。示教器软件允许应用灵活性和独立于示教路径控制机器人接口信号。 Fanuc RJ-3 示教器具有多功能技

Fanuc R30iB 示教器是 Fanuc 必须提供的最新示教器型号之一。作为一种操作简单、经济、快速、高效的示教器,它正在获得机器人行业的认可。 R-30iB 示教器(部件号 A05B-2518-C302)很受欢迎,因为设计该示教器时的重点之一是用户友好性。虽然 iPendant Touch 因其符合人体工程学的设计和大尺寸彩色触摸屏而为任何熟悉 Fanuc 旧式示教器的人所熟知,但它还有其他功能键以及帮助键,这应该有助于提高易用性设备,根据 Fanuc 网站。 新的Fanuc R30iB A05B2518C302 iPendant还有控制第七轴和八轴的功能键,也可以选择在显示器上显示

当一部热播剧收官之际,总要高调出场。 Fanuc RJ3 系列的亮点是 Fanuc RJ3iC 示教器。 RJ3iC(部件号 A05B-2490-C175)示教器仍然保留了早期型号的许多功能,包括碰撞检测、符合人体工程学设计的示教器和多任务操作系统。这款吊坠还保留了 iPendant 触摸屏选项的奢华,同时通过彩色显示屏提升了质量。 然而,正是这款示教器的创新使其在市场上保持了竞争力。 Fanuc RJ3-iC 吊坠通过控制多达 40 个运动轴改进了 iB 模型,这在该系列的早期是闻所未闻的。该挂件最多可同时控制4台机器人,以及8个运动组16个辅助运动轴。 此外,虽然 RJ3 iC A0

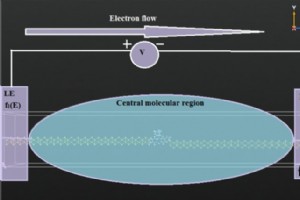
人类能够感知他们周围的环境因素,并知道他们的每个身体部位在任何特定时间都在做什么,而机器人则无法提供这种奢侈。小巧轻便的传感器帮助机器人适应它们所在的位置、它们正在做的事情以及它们自己的零件所在的位置。随着机器人变得越来越复杂,工程师们增加了机器人上使用的传感器数量。单个任务可能需要不同传感器的组合。 光传感器检测光并产生电压差。光敏电阻和光伏电池是最常见的光传感器类型。光敏电阻的阻值随光照强度的变化而变化,易于实现。光伏电池将太阳辐射转化为电能。 声音传感器检测声音并返回与声级成正比的电压。传感器通常是一个麦克风,甚至可以帮助一个简单的机器人根据它接收到的声音进行导航。复杂的机器人可以使

虽然大多数机器人用户是汽车、电子产品和消费品制造商,但小型企业代表了机器人市场中不断增长的部分。也许令人惊讶的是,95% 的 Motoman 客户拥有五个或更少的机器人。员工人数少于 100 人且机器人少于 10 台的企业被视为“小型企业”,他们在投资机器人时面临着独特的挑战。 由于较小的公司通常拥有较小的产品范围和更精确的应用程序,因此他们没有那么多机会使他们的应用程序多样化。但如果业主随时了解情况,他们就能了解他们系统的灵活性以及如何使用机器人来满足未来和当前的需求。对公司而言,拥有可以快速设置并在必要时切换到另一条产品线的灵活自动化非常重要。 小型企业面临的一个挑战是需要聘请机器

机器人不一定要很大才能提高生产力。小型机器人正在制造市场中找到自己的位置。 KUKA 展示了 KR AGILUS 系列,这是一个全面的小型机器人系列,证明小型机器人在制造领域非常有效。该系列机器人具有五轴或六轴、速度快、循环时间短和集成供能系统。 KR AGILUS 系列引入了 Safe Robot 功能,通过新的自动化概念简化了人机协作。 Motoman SV3 是一款紧凑型 6 轴工业机器人,用于焊接和装配等小型零件应用。 SV3X 机械臂具有 677 毫米的工作范围和同类产品中最宽的工作范围。可以将小型夹持器连接到手腕上以执行材料处理和拾取和放置应用程序。这种紧凑型占地面积小,可以

与 Motoman 系列中的许多机器人一样,UP165 是一台复杂的机器,其零件数量超出您的想象。与每个 Motoman 机器人一样,UP-165 具有伺服电机、内部接线和其他有助于机器人移动的部件。然而,正是 Motoman UP 165 中的手腕构造使机器人能够相应地执行其工作。手腕单元,部件号HW917,由手腕和手腕底座组成。 腕部底座(部件号 HW9100890-1)是机器人的一部分,用于将腕部连接到 B 轴上的机器人其余部分。这个手腕底座将电线从手腕穿过机器人的其余部分,然后向下到达控制器。然后是手腕,零件号为 HW9100896-1,它可以为连接到机器人的任何臂端工具提供运动。手

机器人可以执行的任务范围每年都在迅速扩大。在过去的几十年里,机器人已经在许多对人类来说危险、乏味或累人的过程中取代了体力劳动者。与手工劳动相比,自动化可以提高制造商的精度、速度和效率。 工业机器人是重复性或危险任务的理想选择,例如举起重物、处理化学品、喷漆和执行装配工作。它们存在于汽车和制造业中。第一种类型的工业机器人是笛卡尔/龙门机器人。它配备了一个带三个关节的臂,与笛卡尔协调器重合,用于拾取和放置工作、密封剂应用、机器处理和焊接。圆柱形机器人可以处理压铸操作和其他装配操作。专门从事焊接的球形机器人。 SCARA 机器人具有顺应性的平行旋转关节,因此非常适合拾取和放置工作。多关节机器人至少

Fanuc RJ3iB 是广受欢迎的 Fanuc RJ3 系列中的第二款示教器。虽然有许多功能保持不变,但也有许多功能发生了变化。 与之前的示教器一样,零件号为 A05B-2301-C370 的 Fanuc RJ3-iB 从一个示教器控制多达 16 个运动轴。它的设计也考虑了人体工程学。 RJ3IB 与其前身非常相似,具有轻巧的设计和更大、易于阅读的背光显示屏。 RJ3 最多只能移动三个辅助运动组,而 RJ3iB 最多可以移动五个,向更多轴控制迈进了一步。 RJ3-iB 还具有多任务处理能力,因此它可以同时执行多个程序和高级存储,具有改进的网络功能,包括内置以太网和其他接口。 A05B2

与其他机器人公司一样,Motoman 开发了紧凑型机器人以促进在密闭空间内的工作。 MH5F 和 MH5LF 是紧凑而强大的型号,专为小零件装配、材料处理和包装而设计。两种型号的细长臂设计减少了机器人工具和上臂之间的干扰。 B轴运动范围也得到改善,同时B轴和Y轴之间的距离缩短,从而增加了承载能力。 Motoman 的 HP3 工业机器人手臂专为在小型、紧凑的环境中工作而设计。它非常适合机器装载和管理、分配以及其他具有 701 毫米工作范围的应用。 MH6 高速机械臂具有出色的可重复性。宽阔的工作范围和内置的防撞装置增强了机械臂的吸引力。小的干涉半径允许手臂放置在工件上。 Motoman

好东西都是小包装的。紧凑型机器人适合狭小的工作空间,并且与大型机器人一样灵活高效。紧凑型机器人的明显优势之一是大大减少了占地面积。 紧凑型机器人的尺寸远小于传统机器人单元。这使机器即使在最小的工厂空间内也能轻松安装并与其他设备集成。紧凑型机器人具有出色的灵活性,专为在狭小空间内完成大型工作而设计。紧凑型机器人为持续运行提供了出色的可靠性,因为它们的运动部件最少。性能不会因为尺寸而受到影响。 紧凑型机器人通常提供纤细的机身设计,以及紧凑的手腕设计,与同类大型机器人相比,可以实现更大的运动和更少的机械限制。卓越的伺服控制可实现高速运动控制,实现平稳和精确的操作。 尽管它们很小,但紧凑型机器

每一段历史都必须从某个地方开始。对于 Motoman Robotics,其示教器的历史始于 Motoman MRC 示教器。虽然这不是 Motoman 拥有的第一个示教器,但它在许多领域都是第一个。 MRC 示教器于 1994 年推出,部件号为 JZNC-MPP10E、JZNC-MPP20E 和 JZNC-MPP22E,领先于当时的时代。这是第一个可以从一个示教器同步两个机器人的机器人示教器。 JZNCMPP10E MRC Motoman 示教器专为 SK 系列打造,能够帮助将机器人的工作量增加 300%。与之前的示教器 Motoman ERC 相比,它还可以控制更多的轴。 除了这些功能外

示教器有别于竞争对手的一件事是它的易用性。 1998 年,Motoman XRC 示教器是该领域的佼佼者,甚至因其人性化设计而获奖。 XRC 示教器是 Motoman 在四年前的 MRC 之后的下一步。 XRC Motoman 示教器能够控制多达 27 个轴,而早期型号仅限于 21 个。该示教器专为 Motoman 的 UP 系列机器人而设计,一次可以同步的不是两个,而是四个机器人,这甚至增加了更快地实现焊接、涂装和码垛自动化。 XRC 吊坠,型号为 JZNC-XPP20B、JZNC-XPP04B、JZNC-XPP02B 和 JZNC-XPP02,是第一个具有 Windows 界面的吊坠,

在等离子切割领域,有几种不同的设备可用于完成工作。一些商店采用手动便携式等离子切割机,而其他商店则决定使用等离子切割机器人实现自动化。每种方法各有优缺点。 那么,在我们开始之前,什么是等离子切割?等离子切割是一种被多个不同行业用来切割不同厚度金属的应用。火炬使用带电的高速吹入惰性气体,将部分气体转化为等离子体。由于等离子体非常热,它熔化金属工件,熔化的金属被气体吹走。 如上所述,有几种不同的方法可以实现这种级别的切割应用,一些公司决定使用便携式等离子切割机。这些便携式机器相当便宜,有些价格不到 5,000 美元,而且它们能够切割中型部件,可供制造商和业余爱好者等使用。 然而,当谈到速度和
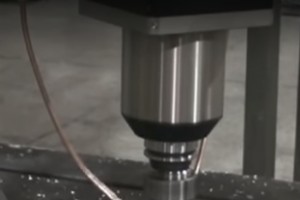
如今,机器人去毛刺技术在制造业中有许多用途。一些机器人使用视觉技术为小零件去毛刺,而另一些则为大零件去毛刺。 Fanuc Robotics 是工业机器人领域的领导者,在最新的机器人去毛刺技术方面处于领先地位。 Fanuc 拥有许多非常适合去毛刺以及其他材料去除应用的机器人。真正影响去毛刺的是所使用的臂端工具。许多机器人都可以灵活地通过快速更换末端执行器来去除多个不同物品的毛刺。 Fanuc M 系列蜘蛛机器人使用小型气动去毛刺工具,该工具足够精确,可以去除一小组风扇叶片和其他小零件上的刻痕。在将末端执行器用于此类工作之前,研究可用的适当去毛刺机器人技术非常重要。太粗糙的东西可能会损坏小零件

机器人并不是最便宜的投资。就像汽车一样,它们的价格范围从 25,000 美元到 75,000 美元甚至更多,具体取决于系统。钻井机器人也不例外。然而,就工业机器人而言,它为制造商节省了数千美元,超出成本,通常在第一年就收回成本。 为一家玻璃钢工厂安装的 Motoman 钻孔机器人系统就是这种情况。据 Motoman 网站称,Motoman 在工厂安装的机器人钻孔系统最终在短短四个月内就收回了成本。 这家制造商遇到了制造玻璃增强塑料浴槽的艰巨工作的问题。钻孔任务充满灰尘和噪音,而且密集且错误百出。 Motoman 通过安装 UP 系列机器人钻孔机解决了这个问题。 安装机器人钻孔机后,机器人

砂轮在许多车间和工业环境中都很常见。无论磨削是一种爱好还是您拥有一整套磨削机器人供您使用,砂轮这种易碎机械的保养规则似乎都是相似的。 如上所述,砂轮,无论是手持式还是机器人末端执行器,都是易碎品。正因为如此,如果有意想不到的东西击中它们或进入它们的路径,很容易将它们切碎。 拿到新砂轮时,您应该做的第一件事就是检查砂轮本身。这是砂轮保养最重要的步骤之一。根据 Yahoo.com 的一篇文章,如果您的砂轮中有切屑,则其使用寿命会大大缩短。 另外,有裂纹的车轮是完全损失,应退回制造商处退款。无法保养或修理破裂的砂轮。制造商绝不允许操作员使用破裂的砂轮或将其连接到打磨机器人上。该网站称,有裂纹的
工业机器人