工业4.0先进制造技术信息网站!

当人们在工厂环境中操作时,他们通常有一个固定的工作空间,一个放置他们完成工作所需的所有工具的地方。工业环境中的机器人工作空间也是如此。 有许多不同的方式来考虑机器人的工作空间,但它基本上被定义为机器人运行的空间。这可能在生产线上或工作单元中。无论它们在哪里操作,每个工业关节机器人都有一个定义的工作空间——它能够在一个区域周围移动的空间量。 当然,机器人工作空间将比人类工作空间大得多。这些精确的金属大师在蹲下时可以坐到 8 英尺高,并且在需要时可以伸展很远。机器人工作空间的直径可能超过 20-30 英尺,甚至更长。还有一些较小的机器人可能具有较小的工作空间,例如蜘蛛机器人,它们被编程为在一条

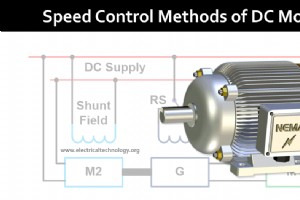
机器人伺服电机已经存在了几十年,用于多种不同的物品和应用。这些小型电机体积小且节能,这使得它们可以用于从玩具汽车到飞机再到机器人的所有事物。 根据 jameco.com 上的一篇文章,机器人伺服电机基本上是一个带有测量电动势的仪器和控制电路的小型电机。伺服电机由伺服驱动器控制,伺服驱动器有时位于电机上,有时是分开的。电机从驱动器获取电子信号以进行运动控制,并将有关运动的反馈发送回驱动器。 根据该文章,虽然伺服电机可用于无线电遥控飞机的位置控制和方向舵,但机器人伺服电机通常用于步行机器人和操作机器人抓手。 伺服电机机器人甚至可以在最恶劣的环境中使用,就像他们操作的机器人一样。这些伺服电机非
世界上有很多机器人公司——Motoman、KUKA、ABB、Universal Robots 等——机器人行业的领导者之一是 Fanuc Robotics America,它是日本主要 Fanuc 公司的众多子公司之一。 Fanuc Robotics America 是北美和南美的机器人供应商。该公司成立于 1982 年,当时 Fanuc Corporation 与美国通用汽车公司合作成立了 GMFanuc Robotics。十年后,通用汽车将其持有的公司股份卖给了发那科,GMFanuc 成为美国发那科机器人公司。 如今,美国发那科机器人公司正在为两大洲提供全系列的工业机器人,包括M系列、

机器人已被航空航天业使用多年,现在,它们的使用比以往任何时候都多,因为它们的速度和准确性是涂装自动化的两个主要优势。 根据 2013 年 6 月 Robotxworld.com 上的一篇文章,波音公司正在使用机器人为 777 飞机的 166 英尺机翼喷漆。虽然这个过程需要人类工人长达四个半小时,但机器人可以在 24 分钟内完成。这种速度是自动化涂装过程更具吸引力的好处之一。 涂装自动化的另一个好处?缺乏过度喷涂。由于机器人准确而精确,因此不会浪费大量油漆。事实上,他们不仅不会浪费很多油漆,而且在物体上使用的油漆也更少。文章称,自从波音转向涂装自动化后,每个机翼的涂装量减少了 70 磅。

当制造商首次设计他们的机器人工作单元或系统时,他们需要设想可用的占地面积。那些设施较小的人可以通过在架空轨道上运行的轨道式或龙门式机器人来节省占地面积。 龙门机器人不仅在设计上有利于节省占地空间,它们还能够节省占地空间,尤其是在码垛应用中,因为它们可以比典型的落地式机器人堆放更高的产品。 尽管它们的外观颠倒了,但安装在轨道上的机器人实际上可能是需要节省占地面积的更高效的制造商。机器人可以沿着轨道移动,在生产线上做几件事,而不是在一个固定的位置和区域。当制造商的占地面积有限时,这还可以通过让一台安装在轨道上的机器人完成两台或三台安装在地板上的机器人的工作来为制造商节省资金。 来自 Fanu

最近,美国国家标准协会批准了一项新的机器人安全标准。这些新的机器人安全措施基本上表明,人类能够安全地与机器人近距离接触工作,甚至可能不需要固定装置或定位器。 这种标准的变化可能会让制造商认为机器人不会对他们的人类工人构成威胁。想到这种性质是错误的。在使用机器人时,工人需要时刻保持警惕并遵守所有安全标准,以免受伤。 根据 Milos Vasic 和 Aude Billard 在 2013 年 IEEE 机器人与自动化国际会议上发表的一项研究,机器人能够在大型操作空间中以强大而快速的运动移动。虽然有安全围栏、光幕和加压垫等保护措施,但应向所有新工人全面教授新的机器人安全培训,他们可能会低估他们

工厂机器人通常被视为大型、坚硬的钢片,它们很危险,无法与人类互换工作。较新的工厂机器人实际上就是这样做的——它们与人类合作以在工作场所提高效率。 与他们快速移动、有力的前辈不同,较新的工厂机器人配备了允许人类近距离工作的功能。麻省理工学院的 Julie A. Shah 博士最近进行的一项研究让人类和机器人团队在装配线上放置螺丝和钻孔。 在这项研究中,机器人和人类进行交叉训练,在任务进行到一半时转换工作。研究发现,当机器人和人类作为一个团队进行交叉训练时,他们都能更好地学习他们的任务。 在学习自己的工作的同时,这项研究中的工厂机器人也学会了预测人类伙伴的动作。团队中的人类也获得了额外的技能

当您喝一口 Snapple 时,请记住,在它到达您手中之前,它必须经过装瓶和包装。越来越多的公司正在转向瓶子包装自动化以节省金钱和时间。自动化消除了人类包装箱的高度重复运动,并防止了人类污染产品的可能性。包装质量也得到提升。 Motoman 提供瓶子包装、托盘包装、散装组合装载、组装和瓶子的机器卸载单元,他们的机器人能够进行装箱、打包、编带、码垛和拉伸包装。他们的产品线包括物料搬运机器人、进料/出料配置真空站、片材分配器、倒瓶器和瓶夹,可提高质量和投资回报。这些机器人的一些示例包括 HP20、HP50、IA20、EPL80、EPL160 和 DX 1350。 Overveld Packag

注塑成型是一种将材料注入模具的制造工艺。通常液态热塑性或热固性材料用于填充模具,在模具中凝固后,必须将成品部件从注塑机中取出。由于某些零件对于人类来说可能很大或笨重,因此机器人为拆卸问题提供了完美的解决方案。他们以比人类同行更高的效率和速度从机器上取下零件。 注塑成型机器人是许多应用的理想选择,例如物料搬运、分配、机器装载和机器维护,并通过快速、准确的动作履行职责。塑料和橡胶零件预处理、激光焊接和组合材料等注塑模具维护工作在自动化后变得简单、流畅。 此外,注塑机在机器人的照料下可以全天候运行。机器人不需要休息或花时间推断如何最好地移除零件,它们也不会改变零件的时间和位置。显然,当机器人掌舵

有时去除外包装和包装食品可能很麻烦,但包装是为了顾客的安全和满意。机器人使食品包装过程自动化,使其成为一个更高效、更可靠的过程。食品包装机器人足够灵活,可以处理各种各样的包装,而且它们的维护要求通常较低,因此它们可以可靠、快速地重复动作。食品和饮料行业的机器人有利于传统应用,如拣选、包装和码垛,甚至可以用于肉类切割和饮料分配。转换为自动化包装系统可降低成本、提高生产率并解决产品完整性问题和占地面积限制。 机器人对食品的包装可以描述为两个过程:一次包装和二次包装。当机器人将食物放入第一个包装纸或包装层时,就会发生初级包装。初级包装对快速输出的需求是巨大的,而机器人可以胜任这项任务。当机器人将初

汽车制造业一直是展示在装配线上使用机器人的好处的旗舰行业。焊接机器人一排排火花四溅的画面,对很多人来说都不陌生。然而,通常没有考虑到的是自动化机器加载过程可能带来的巨大成本节约和效率提升。 机器装载机器人节省了大量繁重和单调的人力劳动,特别是在汽车行业,大型、笨重和笨重的零件需要非常快速和精确地放置在生产机器附近,特别是连续几个小时。在竞争激烈的汽车行业中,机器装载机器人可能是盈利与否的区别。 KUKA KR 系列架装机器人是有用的汽车机器装载机器人的一个很好的例子。来自 KUKA、Fanuc 和 Motoman 等公司的机器人提供多种安装选项和有效载荷能力,以适应汽车装配线上的任何位置。

注塑机器人通过将各种类型的材料注入模具来生产零件。凭借其长距离(水平和垂直)和高度的灵活性,这些机器人在许多行业中变得越来越频繁。它们专为多种工艺而设计,例如将组件装入注塑机,以及精加工和组装注塑件。他们甚至可以执行模内装饰和标签等二次加工。用于注塑成型的机器人具有成本效益和时间效率。 注塑成型工作单元现在也执行声波和激光焊接操作。使用注塑单元进行焊接可缩短周期时间,这在注塑行业中至关重要。此外,注塑成型工作单元可以预处理塑料或橡胶部件。这在应用粘合剂或给零件上漆之前很有用。 二次机器人注塑成型的主要类型之一是嵌件装载。在循环时间内,机器人可以将金属或塑料零件插入机器进行成型过程。然后

随着焊接单元机器人技术变得越来越普遍,机器人公司争先恐后地想出下一个吸引客户眼球的“大事”。 KUKA 提供的产品是新的 KUKA flexible CUBE。 KUKA flexibleCUBE 焊接单元是 KUKA 对日益激烈的竞争和对制造生产的更高要求的回应。该公司决定生产模块化机器人焊接单元来满足需求。 该机器人焊接单元自动化简单。 KUKA 设计的这个系统可以简单无缝地集成到制造过程中。该系统基本上是即插即用的。有了强大的集成计划和知识渊博的操作员,集成过程将完全无痛。 flexibleCUBE 专为灵活性、质量和安全性而设计。它具有多种安全性和灵活性选项,从长远来看可为制造商

一些行业使用自动化焊接,其中许多行业使用焊接单元来进一步集成他们的焊接系统。这些机器人焊接单元具有许多优点。然而,三个优势比其他优势更突出——速度、准确性和安全性。 机器人焊接单元的速度是给定的。无论是集成在一条生产线上还是在一个单元中,机器人焊工都比手动应用更快。通过进一步组合流程并简化机器人焊接单元的生产,生产速度只会提高。 提高准确性是使公司在竞争中保持领先地位的原因。卓越的焊接和精度生产出更好的产品,而更好的产品会增加公司的收入。制造商可以通过安装机器人焊接单元来提高准确性。机器人焊工的手比人工应用更稳定。 安全是当今制造业的一个大问题。由于生产线上的工作单调乏味,有时还会导致受

多年来,研究人员为机械臂设计了几种不同的抓取末端执行器。这些抓取器要么与机械手、钳口、爪子一起工作,要么与吸力一起工作。然而,一组研究人员推测,最好的夹持器可能根本不是其中任何一种。 答案可能非常简单,看起来很愚蠢——乳胶气球中的咖啡渣。 是的,没错——有了所有可用于操纵、组装、提升、拖运和码垛物品的机制,正是这个简单的末端执行器可能会改变整个游戏规则。 康奈尔大学的研究人员设计了这种新的抓手,他们称之为“万能抓手”。根据丽贝卡·博伊尔 (Rebecca Boyle) 的一篇文章,这种通用夹持器利用了一种称为干扰过渡的物理现象。 她的这种物质转变的例子使用咖啡渣。当咖啡渣被真空密封时,

夹持器是制造业中最常用的末端执行器之一。它们用于多种不同的物料搬运应用,包括码垛、取放和包装。现在,一些机器人抓手可能会通过添加抓手传感器变得更加敏感。 根据 roboticstrends.com 的一篇文章,研究人员开始将人造皮肤和传感器应用于机器人,以进一步提高它们在这些领域的准确性和精确度。这些抓取传感器还可能意味着更好地与其他机器人和人类进行交流和合作。 这种被称为 ROBOSKIN 的新“皮肤”允许机器人抓手传感器实际为机器人提供人工触觉。 ROBOSKIN 以真实的人类皮肤为模型,具有人造神经,可以感知环境的变化,如从热到冷或从光滑到粗糙。 目前这款皮肤还在开发中。它目前被用

在观察机器人抓手时,没有比伺服抓手更令人着迷的了。伺服电动夹具与其他爪式和气动夹具有些相关,但它们更像人。这使伺服夹持器能够控制拾取物体时使用的力的大小。 与目前市场上其他类似的爪形机器人夹具相比,使用伺服电动夹具有几个优点。 位置控制 :可以定义和控制伺服夹具的位置。它不必在每次操作时都完成其全部运动范围。它可以有不同程度的运动,具体取决于它处理的物品。 力的控制 :由于夹持器可以更好地控制其运动,因此它还可以控制其工作的力和速度。这可以帮助机器人伺服夹持器从一种材料公差变为另一种材料公差,而无需重新编程。 抓握 :由于伺服电动夹具使用的编码电机,机器人可以检测到末端执行器何时拾取了物品

一些行业将工业机器人技术视为保持生产运转的基础。食品行业也不例外。这个行业很好地利用机器人食品抓手来处理美国人消费的食品和饮料。 当今食品行业使用了多种食品机器人夹具。最常用的两种是爪式和真空式夹具。 Claw 食品夹具由不锈钢制成,经过食品级处理。这意味着他们可以在加工和包装线上处理新鲜食品,例如肉类和农产品。像这样的机器人抓手可用于将小到黄瓜的东西拖到大到牛肉的一侧,具体取决于负载能力。 许多码垛和包装领域都采用真空食品夹持器,即利用吸盘一次夹持平面或多个物体的机器人夹持器。他们可以处理板条箱、盒子、罐头、瓶子甚至托盘。同样,持有的数量取决于操作机器人的有效负载能力。 这些机器人食

当人们想到可能使用机器人焊接单元的行业时,他们可能会想到汽车或电子行业,甚至是航空航天行业。然而,他们首先想到的是医疗保健行业,这是值得怀疑的——那是错误的。 多年来,医疗保健行业一直在使用机器人技术来制造他们的产品,这些应用包括焊接。 自 2005 年以来,医疗保健产品制造商 Midmark Corporation 就在他们的设施中实现了焊接单元自动化,当时他们将 Motoman 焊接单元与机器人焊机和机器人定位器集成在一起。安装焊接单元以组装和焊接检查台的机柜。 从那个焊接单元开始,Midmark 扩大了他们的业务,甚至为那些更高产量的产品线增加了一个 GMAW 单元。随着时间的推移

Machine Tending 机器人主要负责确保机器正常运行。他们还可以将零件送入和送出机器。看管注塑机的机器人是人力的替代品。例如,成型机中的某些零件太大,一个人无法卸下。注塑机属于其他机器管理应用,例如压铸机和机床。 Fanuc R2000iC/165 机器人用于全自动独立注塑成型系统。这款 6 轴机器人具有 165 公斤的有效载荷和一个 R30iA 控制器。它拥有带有 Robohand 3 爪气动夹具的定制臂端工具。它还配备了 iRVision 3DL 传感器。这些功能允许 R2000iC/165 型号卸垛和重新堆垛、拾取产品并将其放入预热器、从预热器中拾取并将其放入注塑机、从机器中
工业机器人