工业4.0先进制造技术信息网站!

随着自动化、价格和可访问性的不断进步,越来越多的公司将机器人应用到他们的生产中。可以理解的是,这种变化会让员工感到恐惧,他们觉得自己的工作可能会被剥夺。实际上,机器人正在将这些工人从乏味、沉闷甚至有时危险的工作中解放出来,同时让他们获得更好的机会。 机器人使工人远离伤害的最好例子之一是机器人焊接。重复的手工焊接对人体极其有害。来自金属和涂层的危险烟雾会导致严重的疾病。有些产品含有铅或石棉;接触会导致肺气肿、肺癌甚至肾衰竭。 除了烟雾,手工焊接还会产生大量噪音和高温。嘈杂的环境会导致焊工听力下降和压力;而热量会导致灼伤或中暑。焊枪发出的紫外线会引起紫外线角膜炎,又称“焊闪光”。 机器

我们从客户那里得到的最常见问题之一是“我的机器人和控制器中的电池是做什么用的,我应该多久更换一次?”这通常会导致“我该如何更改它们?”机器人和控制器中的电池都用于在机器人和控制器断电时维持存储的数据。然而,存储的数据在机器人手臂和控制器之间是不同的,但同样重要。应查阅维护手册以了解正确的更换方法。 存储在机器人手臂中的数据对于维护机器人中每个轴的编码器脉冲值很重要。这控制着机器人的位置数据。如果机械臂中的电池出现故障,如果主电源丢失,则需要重新控制机器人。每年更换一次,作为预防性维护,将确保电池按要求充电和运行。 机器人控制器中使用的电池可在设备断电时保存内部存储器。这包括程序、已安

附在机器人手臂上的主轴必须灵活、耐用,并满足机器人的有效载荷限制,才能进行适当的机器人加工。机器人加工提出了独特的挑战,例如轻型结构以最大限度地减少有效载荷应力、污染保护以及从多个角度进行操作。 机器人主轴应符合制造商的需求。有适用于狭小空间的轻型小型型号,也有适用于苛刻的材料去除操作的坚固、功能强大的型号。根据每种应用的需要,应谨慎选择主轴。 应在考虑孔径和深度、公差以及额外加工的需要后选择用于钻孔应用的主轴。当需要高速材料去除或高精度表面光洁度时,使用机器人铣削(雕刻和铣削应用)主轴。研磨主轴使用砂轮将金属、玻璃、陶瓷或其他材料研磨成所需的形状或光洁度。去毛刺和去毛边主轴采用高速和低

工业机器人可以执行数十种不同的应用,一些生产线在产品完成之前可能需要几种不同的应用。那么,您如何决定在何处集成 3D 视觉系统?哪些应用程序将从这种技术中获益最多?下面列出了一些可以从激光视觉系统与 3D 集成中获益匪浅的应用程序。 许多专家认为 3D 视觉系统最适合物料搬运应用。事实上,列表中的前三个是该应用系列的一部分——拣选、包装和码垛。 拣选是采用三维技术的 3D 视觉系统最常见的用途之一。垃圾箱拣选顾名思义——从垃圾箱中拣选零件。这可能看起来很简单,但当您使用 3D 视觉系统时,机器人就会焕然一新。它可以区分零件的颜色和尺寸,以确保挑选出该部分生产所需的正确零件。 3D

事实是,自 1990 年代以来,美国的制造业劳动力成本上涨了约 24%,而且随着我们继续见证不断变化的劳动力,预计只会上涨。该行业正面临严重的劳动力短缺,因为从事制造业工作的人越来越少。人们跳槽是很常见的,这会造成劳动力可靠性问题。员工计划长期或什至整个职业生涯留在一家公司的时间已经一去不复返了。这些因素以及更多因素导致劳动力成本和风险持续增加,公司需要通过机器人自动化来降低这些风险。 机器人行业的最新发展使机器人对用户更友好、更直观且价格更实惠。随着机器人技术的不断创新,机器人出现在每个行业和市场也就不足为奇了。从工业制造、食品生产和包装到医疗领域,一切都在利用机器人让他们的行业变得更

机器人工作单元的设计方式应能提高效率、降低成本并提高给定机器人应用的零件质量。预先设计的工作单元是根据精益制造的原则设计的,以改善应用流程并消除过程中的浪费。正如 asq.org 所定义的那样,精益制造是“一套通过消除浪费来提高效率和有效性的管理实践。精益的核心原则是减少和消除非增值活动和浪费”。 工作单元不仅是安全屏障,虽然这是一个关键组成部分,但它们也允许多任务处理。当机器人在定位器的一侧工作时,您可以在另一侧安全地装载和卸载零件。这消除了每次零件通过该站时的额外步骤。 在生产流程中精心设计的机器人工作单元通过其灵活性提高了效率。可以对机器人进行编程以执行多种功能。多个机器人可以同

速度和多功能性: Motoman UP6 仍然是适用于各种应用的常用机器人。这种特殊的机器人专为擅长电弧焊、mig 焊和 tig 焊而设计。但是,它也可用于等离子切割、材料处理和材料去除应用。 UP6 可以高速执行这些任务,并具有出色的可重复性 (±0.08 mm)。它还可以通过其防撞技术与同一工作空间中的其他机器人同步。通过同时处理零件的多个区域,可以提高生产速度并缩短周期时间。 紧凑型设计: 此外,UP6 设计紧凑。这是有益的,因为它在工厂车间占用的安装空间极小。细长的底座和臂设计提供了卓越的性能并提高了零件的可接近性,因为它在靠近零件和工装夹具的地方工作。 大工作范围: 即使

不要被“翻新机器人”这个词吓到!了解如何在不牺牲质量的情况下节省更多资金。 如果您正在考虑在您的生产线中实现流程自动化,但您不太确定您是否能够负担得起新机器人的初始成本,我们有一个很好的解决方案:翻新机器人!购买新机器人时的价格冲击可能令人恐惧,但知道还有另一种更省钱的选择可以减少对自动化的恐惧。 那么什么是翻新机器人? 翻新过的机器人,就像一辆二手车,是一台有过去的机器。之前已经被其他公司使用过,对于机器人集成商来说,需要一些细心的呵护。然而,与二手车不同,用过的机器人可以很容易地恢复。适当翻新后,机器人的寿命可延长至与新机器人相当的寿命。然后它可以重新集成到制造领域,执行

Lincoln Electric 的 Power Wave 电源能够进行复杂、高速和高性能的波形控制。 Power Wave 技术旨在为所有客户的需求及其复杂的材料要求提供完整的焊接质量控制。它为制造商提供了任何零件轮廓所需的灵活性和定制。 Power Wave 为客户提供整个焊接操作的视图,同时还提供最大的灵活性、工艺定制以及完成焊接质量控制所需的所有工具。它通过针对线径、合金成分和焊接位置等特定应用的先进工艺提高了生产率。 Power Wave 的运作基于三个原则,有助于提供这种卓越的质量控制。 波形控制技术有助于实施 并优化特定焊接应用的电弧性能。 控制 通过设备和操作员指标以

需要帮助码垛覆盖物、谷物、盆栽土等袋子吗?担心刺破袋子并影响产品?想要提高堆叠速度并停止折断背部吗?有出色的码垛机器人和夹具选项可用于处理此特定任务。选择合适的机器人抓袋器来自动化您的流程非常重要,而 RobotWorx 可助您一臂之力。 最常见的袋子抓手设计有两个大钳口,两侧各有几个尖头,垂直闭合并托住袋子将其提起。在评估包夹时,了解尺寸、形状和重量很重要。拿起产品的方式很可能与放下产品的方式不同,了解这些处理要求可以避免安装后的麻烦。 使用输送系统?没问题!有多种方法可以设置抓袋器以适当地装入轨道或托盘槽中。然后摇篮或手指可以在袋子下面滑动,大大降低了刺破袋子的风险。

工业机器人现在结合力感应和机器人视觉来创造触觉智能。这两种技术已被引入行业,以提高机器人在制造业中的有效性。随着我们在自动化世界中不断前进,随着技术呈指数级发展,工业机器人不断得到升级和增强。 因此,随着机器人通过这些进步征服更精确、完美和高效的应用程序,制造业变得越来越复杂。制造商不断改进这些工艺,提高生产质量,同时降低成本。 Fanuc 的力传感器 Fanuc 的力传感器具有几乎类似于人类的触觉,使它们能够检测在所有 6 个自由度上施加到 EOAT 的力和扭矩。它们提供工匠般的精度,并使机器人具有“感觉”,以帮助完成要求最苛刻的机械装配或材料去除操作,例如轮廓修整、测量或打磨。此外,

机器人物料搬运被定义为以节省时间、空间和金钱的方式移动、包装或存储物料。当准备好自动化物料搬运应用程序时,我们建议您考虑所有因素,以便为您的设施布置一个良好、高效的机器人系统。机器人是一项投资,机器人集成在第一时间就正确完成是关键。为了让您为最顺畅、最高效的物料搬运集成做好准备,请考虑以下事项: 1。需要什么类型的物料搬运系统? 在 Robotworx,您可以选择零件选择/订单拣选, 转移、包装、码垛、装卸、机器进料或分离。在每种应用中,机器人系统因设备尺寸、材料、方法和功能而异。有效载荷、占地面积和工作范围很大。我们列出了最适合您的物料搬运应用的工业机器人,或者您也可以联系我们的销售
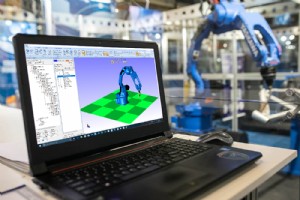
新的和改进的 MotoSim EG VRC 2018-SP2 在这里,它不会让人失望! MotoSim EG (Moto 男人 Sim E 计算系统 增强型 G raphics) VRC 是一种基于 PC 的高精度软件,用于构建模拟和进行离线编程。 精准模拟 该软件可以更轻松地对机器人系统进行可视化、测试和编程,并解决可能在车间发生的任何问题。 Motosim EG VRC 提供机器人单元的精确 3D 仿真,以帮助进行碰撞检测和精确分析以及周期时间计算。机器人控制器显示实际的编程器界面,使虚拟编程步骤与现实世界完全相同。最近的软件升级提供了改进的 3D 图形速度和 CADTree 增

想知道风冷和水冷机器人焊枪之间的主要区别是什么?您是否寻求指导以更好地了解您的焊接工艺需求?比这篇文章更适合你!为了获得最佳性能和成本,将正确的手电筒放在适当的位置总是好的,本文的目的是帮助您到达那个位置。 水冷手电筒 在水冷割炬中,冷却溶液通过软管进入并在割炬主体和易损件中循环,然后返回到吸收热量的冷却器。这样可以冷却焊枪,这样您就可以在更高的安培数下进行更长时间的焊接。这些火炬通常在其电源电缆中使用较少的铜,因为冷却溶液会在积聚和损坏之前去除电阻热。 水冷式割炬在长时间和连续运行时表现出色。这使得生产能够在更高的温度和更快的速度下进行。 根据安培数负载,由于高效的外部冷却系统,

协作机器人 (cobots) 于 2008 年上市,预计将继续以爆炸式增长。它们在操作条件下为操作员提供直接访问和交互。生产线上的人机结合补充了每个人的具体和独特的能力,同时还提供了更高的灵活性和生产力。 协作机器人还通过移除围栏、扫描仪和光幕等安全屏障来开放工作区域,以使人和机器人能够更紧密地协同工作。这将有助于改进应用程序功能并减少机器人单元所需的空间量。 此外,协作机器人的成本越来越低,同时其能力和集成的便利性也在不断提高。自动化生产线正在迅速意识到,将协作机器人与其工业机器人集成在一起将有助于他们在全球范围内保持竞争力。 安全 那么,我们如何确保协作机器人在与人类如此密切互

Universal Robots 很高兴地宣布推出名为 E 系列的新系列,其中包括三款新机器人:UR3-e、UR5-e 和 UR10-e。 Universal Robots 擅长设计自动化解决方案,为各种类型和规模的企业带来最大的安全性、投资回报率和潜力。 最近发布的 e 系列可以满足所有这些需求,而且还可以提供更多功能,因为它提供了快速的自动化部署、无与伦比的简单性和多样化的应用程序覆盖范围。没有编程能力的机器人操作员可以快速设置 UR 机器人并立即开始编程。这些机器人还重量轻、节省空间,并且可以快速重新部署到生产线的其他应用和其他区域。 图片由优傲机器人提供 有哪些新功能?

ABB 很高兴通过发布单臂 YuMi 来扩展其协作机器人系列,这是他们迄今为止最灵活、最紧凑的协作机器人。单臂 YuMi 提供 500 克的额定有效载荷和带视觉和真空的集成夹具 轻巧灵活 单臂 YuMi 是超轻镁(9.5 千克)臂,非常适合多种安装选项,包括天花板、桌面和墙壁安装。它还紧凑而灵活,可以很容易地融入当前的生产线,为所有人带来难以置信的精度。 此外,它可以在七个轴上旋转,以模仿人类的运动,甚至比传统的 6 轴机器人更能模仿。 YuMi 系列机器人甚至可以组合在一起工作以提高灵活性,或者在需要更复杂的装配任务时用作额外的手臂。 单臂YuMi的这些属性,有助于降低机器人新用户

随着消费者期望的不断提高,ABB 正在推出新的改进方法来帮助制造商使其自动化系统与未来工厂保持一致。这一点在他们新发布的 OmniCore 控制器中尤为明显,旨在应对最严峻的挑战并进一步提高单个机器人或整个机群的性能和可靠性。该系列控制器将支持 24/7 运营需求,在这些需求中,上市时间、高吞吐量和良品率对于保持竞争力至关重要。 释放全部潜能 OmniCore 控制器将有助于释放数字化和互联工厂的全部潜力,敏捷性是这个新制造时代的关键。它们为互联的未来工厂提供最广泛的运动控制选项和更多的定制解决方案。 OmniCore 系列中令人印象深刻的控制器系列建立在 IRC5 的传统之上,其中

MAG 焊接机器人是重复焊接的质量和速度至关重要的焊接工艺的完美竞争者。这是提高效率和一致性同时快速获得投资回报的好方法。 金属活性气体 (MAG) 自动焊接类似于 MIG 焊接,但所用保护气体的类型不同。它们都是归类为 GMAS(气体保护金属极电弧焊)的焊接方法的子类型。但是,MIG 使用金属惰性气体,而 MAG 使用金属活性气体。 焊接过程的热量由直流电弧产生,有助于将消耗性金属电极熔化到正在加工的工件上。该金属电极(小直径焊丝)由动力进给辊(送丝机)送入并成为熔池的一部分。电弧和熔池都受到化学活性气体的保护。一种活性气体属于 M21 保护气体类别,也称为混合气体 18 或 MIX
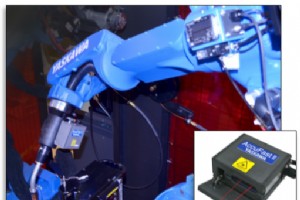
Yaskawa Motoman 提供了多种接缝查找工具,可以像 AccuFast II 一样快速准确地定位接缝。零件并不总是出现在一致的位置,因此很难找到焊缝。接缝查找工具将轻松定位上部和下部并在移动时进行调整。使用接缝查找工具定位上壁或下部部件有助于确定焊缝的最佳位置。 AccuFast II AccuFast II 是一种紧凑的附加功能,可与任何 Motoman 焊接机器人的焊枪串联安装。它与 Motoman 行业领先的 MA 和 VA 系列穿臂机器人以及标准 6 轴机器人兼容。 AccuFast II 具有以下强大功能,一定会提高您的焊接质量并缩短周期时间。 改进的传感器
工业机器人