工业4.0先进制造技术信息网站!

今天,有几个金属行业使用机器人焊接,钢铁和建筑行业也不例外。但是,并非总是如此。 在过去的几十年里,由于更高的沉积率、高质量的成品焊缝和更少的工人错误,行业已经从手动焊工转向机器人焊接单元。 一家名为 ConXtech 的建筑公司早在 2000 年就决定使用机器人焊接单元来帮助建造使用钢框架的中层住宅结构。发那科 (Fanuc) 和林肯电气 (Lincoln Electric) 的产品对于该公司的成功至关重要,因为它们具有正确的作业范围和精度——需要在顶部和底部法兰上进行全熔透焊缝的板材以及在梁的腹板和法兰背面上进行角焊缝的板材。 2006 年,为铁路和其他行业生产多种钢铁产品的制造商

机器人焊接有多种形式,包括气体保护金属极电弧焊和钨极气体保护极电弧焊,分别称为 MIG 和 TIG 焊。虽然机器人焊接过程有很多步骤并且需要不同的设备——机器人手臂、焊枪、填料等——但最重要的事情之一是保护气体,即在焊接过程中保护区域的材料。 保护气体可以是惰性气体,如氦气和氩气,或半惰性气体,如二氧化碳、氧气、氮气和氢气。这些气体,大量使用可能具有破坏性,但少量使用时,它们可以增强机器人焊接。 然而,保护气体的选择取决于机器人焊接应用中使用的金属类型。如果机器人焊接单元使用错误的保护气体,可能会导致焊缝变弱或产生大量飞溅,从而降低生产率。 如果使用得当,这些气体可以保护焊接区域,因此即

多年来,物料搬运机器人一直在通过检测危险或处理危险来提高多个不同领域的安全水平。 物料搬运机器人致力于保护人类安全,这符合艾萨克·阿西莫夫的机器人第一定律:“机器人不得伤害人类,或因不作为而让人类受到伤害。” 这些机器人正在努力确保人类不会被置于危险的环境中或接触有毒化学品。 在野外,有机器人在煤矿中移动和检测对人类的危险,还有为我们的军队工作的机器人,“嗅探”出简易爆炸装置和地雷。这些机器人致力于使人类远离伤害。 工厂中的物料搬运机器人也是如此。危险品处理机器人处理旧弹药、化学品和其他可能对人类工人造成危险的材料。 其中一些危险可能没有您想象的那么严重。例如,当物料搬运机器人系统码

有许多应用程序依赖于机器人的能力以达到极其精确的程度。当公司需要激光切割等应用的精度时,许多公司求助于像 Fanuc Robotics 这样的机器人技术领导者,这是一家以系统精度和可重复性着称的机器人公司。 Fanuc 还拥有多台激光切割机器人,可以执行弧焊和点焊工艺,这使得它们对于制造商来说更加通用。 使用 Fanuc 机器人进行机器人激光切割对制造商具有吸引力有几个原因。 Fanuc 机器人激光切割机非常灵活。它们能够进行三维切割,而其他机器可能只能在垂直或水平平面上进行切割。这些 Fanuc 机器人激光切割系统的占地面积也小于其他机械,这可能是自动化的一个促成因素,尤其是当制造商用于集

如今,越来越多的公司通过使用激光和工业机器人来降低成本。 ADIGE 的系统和 Fanuc Robotics 的软件提高了准确性和生产率,同时减少了对劳动力的需求,从而大大降低了制造成本。 激光最初是受激辐射光放大的首字母缩写词,是一种通过激发原子或分子的光子受激发射产生强光束的装置。虽然激光主要用于照明,但在商业、工业和军事应用中已变得极为有用。 也许最令人印象深刻的是激光切割金属的能力,这使得它在制造业中特别有用。这种应用以及将激光与机器人相结合的能力,已成为降低国内和国际制造成本的主要因素。激光机用于管材的切断、斜切和切割(槽、孔、槽口和其他特征)。由于使用了激光,切口更干净,从而提

选择使用机器人使商店或生产线自动化是一个应该充满热情但又经过深思熟虑的决定。机器人可以提高产量,改进零件处理,并使工人从繁重的体力劳动和昂贵的体力劳动中解放出来。 选择机器人时有几个考虑因素,首先是确定机器人究竟要做什么。接下来,必须确定机器人需要提升的有效载荷。有效载荷的一个注意事项是确保在总有效载荷考虑因素中考虑臂端工具 (EOAT) 的重量。臂端工具可以包括夹具、真空夹具、焊机或钻头等工具。然后需要考虑机器人将工作的空间。这包括机器人需要达到多远以及有效完成工作所需的运动范围。根据这些信息,车间是否有足够的空间来容纳必要的机器人运动范围,这一点将一目了然。 一旦定义了应用、范围、占地

汽车行业正以前所未有的方式蓬勃发展。今年已有超过 1300 万辆汽车在美国各地的工厂下线。这个数字甚至不包括世界各地生产的数百万辆汽车。制造商如何能够满足购车者每隔几年想要新车型的需求?答案很简单:机器人自动化。 自动化机器人系统可用于在生产过程中对车架、挡泥板和车身底部以及车辆的其他部件执行各种汽车任务。虽然改变生产线以在不同的车型上工作过去是乏味且生产缓慢的,但今天的自动化机器人可以重置而无需每次都重新编程 - 无需停止生产线,这提高了制造商的多功能性和生产率。 在 20 世纪 90 年代末和 2000 年代初,克莱斯勒在他们的工厂开始了机器人自动化流程。大约十年前,即 2004 年,

尽管多年来机器人装配应用在复杂性和数量上都有所增加,但由于技术原因,大量应用已被忽略。然而,当自动化机器人配备 3D 视觉时,可能性的范围迅速扩大。 将视觉集成到机器人中大大提高了它们的灵活性。机器人视觉用于越来越多的机器人应用程序,并使各种规模的企业都能显着提高生产率,从而使其在市场上更具竞争力。这些自动化机器人系统能够执行复杂的任务,同时能够比人类工人工作更长的时间。 3D 视觉机器人还可以为制造商显着节省成本,因为它不再需要定制托盘或定位设备来重复定位零件以用于垃圾箱拣选等应用——这是旧机器人应用所需要的。 视觉机器人可以定位箱子中的所有可用零件,选择下一个要拾取的零件,并找

虽然许多人在想到机器人自动化时可能会想到汽车或电子行业,但一个不会立即浮现在脑海中的行业——家具生产——正在开始在世界各地的工厂中实现流程自动化。与其他行业相比,自动化机器人在家具行业的使用相对较少,但机会是巨大的。 自动化机器人用于家具生产应用,包括材料处理和焊接。根据家具的种类和家具构造所需的金属类型,可以使用 MIG、点焊和电弧焊。自动化机器人系统用于焊接学校的桌椅组合,以及麦当劳和其他快餐店的桌椅组合。在构建需要薄金属板的文件柜等物品时,使用电阻焊。 机器人自动化也在缓慢进入木工行业。通过锯切木材等自动化任务获得的精度通过创建统一的木块提高了产品质量。 锯床和铣床工厂已经存在

ABB 正在使机器人金属惰性气体/金属活性气体 (MIG/MAG) 焊接能够为大大小小的行业提供可承受的价格。该公司在电力和自动化技术方面处于世界领先地位,可帮助各行各业提高绩效。 MIG/MAG 焊接,也称为气体保护金属极电弧焊 (GMAW),是一种从消耗性焊丝电极和一块金属形成电弧的工艺。电弧导致金属熔化并与另一个工件连接。自动化这一过程不仅加快了焊接过程,而且提高了行业内的安全标准,使工人远离焊接过程可能产生的有害烟雾。 他们的弧焊机器人之一IRB 1410 ArcPack 是一款质量上乘的自动化机器人焊接套件。它包含进行钢弧焊所需的所有组件。 IRB 1410 为客户提供快速、可靠

枪支管制是美国的一个“热点”问题,多年来一直如此。从美国总统遇刺到数十年的校园枪击悲剧,人类在这个问题上的立场已经两极分化。但我们谈论的是机器人焊枪控制。 多年来,机器人焊枪不断改进,以提高焊接应用过程中的质量和控制。 机器人焊工使用一种工艺,向两个金属工件施加强热,使金属熔化并混合,从而将工件结合在一起。汽车行业、钢铁行业以及其他行业都利用了自动化机器人焊接系统,因为这些工业手臂对其焊枪进行了控制。 在软件模拟和 3D 视觉系统的帮助下,焊接机器人可以更好地控制他们的焊枪。焊接质量更高,应用比以往任何时候都更快、更高效。 当今市场上有几种不同的焊枪。焊枪可以与多种工业机器人集成,包
说到工业机器人,Fanuc Robotics 是业内最知名的品牌之一。该公司供应世界各国,迄今为止销量超过 250,000 件。 该公司设计和制造 Fanuc 机器人来执行各种应用,包括弧焊和点焊、材料处理、材料去除、装配、涂漆和分配。除了生产机器人外,该公司还开发控制器、软件和其他与其最先进的机械配套的产品。 40 多年来,Fanuc 一直在为全球工业提供生产世界上一些最优质产品所需的技术和设备。 Fanuc Robotics 最初是 Fujitsu Corporation 的一部分,这个名字实际上是 F 的缩写 宇治 A 自动 Nu merical C 控制。自 1972 年以来,

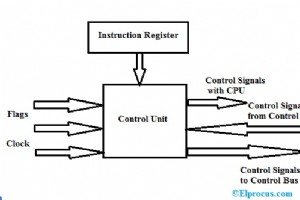
遥控制造过程是对机器人进行编程和完成应用任务的有效方式。遥控器是机器人的“大脑”。它包含的软件使机器人能够智能地执行困难的任务,同时能够与环境交互。遥控器就像一台电脑,让机器人的各个部分协同工作,并与其他系统保持连接。遥控器还运行用代码编写的指令集,以便为机器人编程以用于特定应用。如果没有遥控器,机器人将无法执行任务,使其成为自动化的重要组成部分。 随着技术的新发展,遥控器的生产在过去几年中得以扩大。远程控制越来越智能,这为机器人在非传统领域的新应用打开了大门。远程控制智能化的增加也为那些已经使用机器人技术的行业节省了成本。制造商发现遥控器制造过程更加高效,同时还能节省时间和金钱。借助 Fa

在考虑实现任何工业应用的自动化时,指定能够实现应用目标的工业机器人手臂是重要的开始步骤。为了选择适合公司的工业机器人手臂,应考虑工业应用等因素。 不同的机械臂设计用于执行特定的应用。例如,如果弧焊任务自动化,用户就不会希望集成 Fanuc R-2000iA。 R-2000iA 旨在实现物料搬运任务的自动化。更好的机械臂选择是 Fanuc ARC Mate 机械臂或 Motoman VA1400 机械臂。指定最适合应用的机械臂将有助于确保产品质量和操作效率。 还需要考虑所需的有效载荷能力。许多弧焊应用只需要足够的强度来操作焊枪。材料搬运和点焊等其他应用需要更坚固的机器人手臂来处理更高的有效载

KUKA 是一家总部位于德国的机器人公司,是全球领先的工业机器人生产商之一。他们最初于 1973 年创造了世界上第一个 6 轴机器人,如今他们的机器人被用于多个行业,包括汽车、金属加工和食品。他们的主要总部位于德国奥格斯堡,但他们在密歇根州谢尔比镇也设有北美总部。 作为领先的制造商,KUKA 始终保持领先地位,不断更新其产品线。他们最近增加的一项是用于金属切割和原型制作应用的机器人铣削技术。机器人铣削是一种用于切割材料以形成特定结构(通常是模具或原型)的过程。 KUKA 机器人铣削能够产生更高的吞吐量、更低的资本成本和更高的灵活性。铣削机器人具有灵活性的优势,因为它具有 6 轴结构的大工作范

“机器人”这个词会让人联想到很多画面。根据您的经验和思维方式,“机器人”可以是任何东西,从 Roomba 扫地机器人到全国各地教育设施中使用的乐高和 VEX 机器人,再到我们看到的工业机器人。制造工厂遍布世界各地。所有列出的项目都是机器人和机器人技术的例子。 许多人是通过玩具和媒体接触到机器人和机器人技术的。还记得电视卡通片《杰森一家》中的机器人女仆罗西吗?星球大战电影中的 R2-D2 怎么样?这些和其他机器人技术的例子 通常是我们第一次接触机器人。如果这些机器人的例子 看起来有点过时,不需要看得很远就能找到更现代的例子。 Roomba 机器人吸尘系统定期在我们的电视机上播放广告。本田的

在将零件连接和粘合在一起时,制造商通常可以选择多种焊接方法。有时,制造商必须想出有创意的焊接创意。 MIG、TIG、等离子、冷焊和塑料焊接是当今制造业中采用的几种创造性焊接技术。 MIG 焊: MIG 焊接,也称为气体保护金属极电弧焊 (GMAW),是一种非常常见的焊接形式。在自耗线电极和金属工件之间形成电弧。电力用于将自耗线材和金属部件熔化在一起,形成一个坚固的部件。工业机器人手臂通常借助送丝机和焊炬清洁站等附件执行 MIG 焊接。 TIG 焊接: TIG 焊接,也称为钨极气体保护焊 (GTAW),类似于 MIG 焊接,因为它使用电和电极来产生焊接。不同之处在于电极的类型和工艺。 TIG

精益制造涉及调整流程以高效地及时生产产品。生产过多或过少会导致浪费或客户不满意。在为精益生产线量身定制时,单元设计是实现这一目标的重要步骤。 在设计或选择工作单元之前,需要考虑以下事项: 工作单元将用于生产线的哪个部分? 将执行什么应用程序? 如何从机器或区域装载和卸载零件? 它将向哪个方向移动? 您有多少占地面积? 您想如何安装机器人? 运营商会参与吗?如果是这样,操作员是否需要接触机器人、机器或产品? 产品的生产速度需要多快? 为您的单元设计选择最佳位置和方向在精益制造中起着重要作用。然后使用正确类型和尺寸的机器人可以帮助您减少以后的错误并增加灵活性。

切换正在制造的产品时,需要考虑的一个主要问题是是否需要更改焊接工艺。如果以 MIG 方式焊接产品,新产品是否能够以相同方式焊接?也许 TIG 或其他类型的焊接会更合适。 使用工业机器人手臂进行焊接时,将 MIG 焊机转换为 TIG 焊机很容易。机器人手臂只是简单地操纵焊接部件。 MIG 和 TIG 组件可简单地连接到机器人手臂上。为了完成 MIG 到 TIG 的转换,用户需要更换焊接电源、焊枪、送丝机和安全离合器等组件。 MIG 和 TIG 焊接中使用的焊丝和电极类型各不相同。根据被焊接金属的类型和焊接系统的其他特性(例如保护气体),将使用由不同金属制成的不同电线来导电并熔化到金属部件中。与

计算机辅助设计和计算机辅助制造是指用于设计和制造产品的计算机软件。 CAD/CAM 应用程序用于设计产品和编程制造过程(如机加工)。 CAD 软件创建供 CAM 部分使用的模型和组件,以生成驱动机器将设计转化为物理零件的工具路径。 CAD/CAM 软件最常用于加工原型和成品零件。 IRBCAM 专为工业机器人开发。其生成的机器人代码经过ABB、Fanuc、KUKA、Motoman验证。它具有直观且用户友好的 3D 界面。可以使用图形向导直观地配置带有外轴的复杂机器人系统。 IRBCAM 为 ABB 的 RobotStudio(ABB 的 3D 离线编程环境)发布了 CAD/CAM 插件软
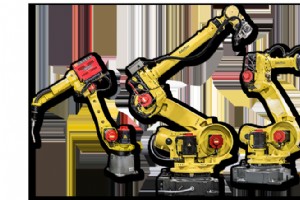
工业机器人